

浮子式液位计测量原理
文中针对浮子式液位计原位校准的问题, 在介绍浮子式液位计测量原理的基础上, 设计一套浮子式液位计原位校准系统, 并介绍系统的软硬件组成、关键技术, 分析系统精度。最后, 通过实验验证系统的稳定性和可靠性, 为浮子式液位计原位校准提供借鉴和参考。
液位仪表常用于过程控制中的液位检测。近年来, 由于液位仪表精度和液位计量自动化要求的不断提高, 使液位仪表广泛应用于液位测量领域
目前, 液位计常见的检定是在实验室环境下进行的, 短量程 (2 m以内) 的液位计一般采用水箱法检定, 中长量程 (2 m以上) 的液位计一般采用比较法检定。两种检定方法如下:
1) 水箱法
2) 比较法
液位计现场安装完成以后标注的是在实验室安装环境下的参数, 现场环境条件与实验室环境条件差别较大, 液位计的安装精度也很难达到实验室内的要求, 而安装后对液位计进行调试也只是确保量程上、下限的准确度, 未做过现场全量程的校准, 导致浮子式液位计在实际使用中出现计量不可靠的问题。针对此问题, 本文设计了一套浮子式液位计原位校准系统, 确保液位计安装后的精度准确可靠。
1 浮子式液位计原位校准系统研究
1.1 浮子式液位计测量原理
浮子式液位计的结构如图1所示, 液位计的传感器工作时, 传感器的电路部分将在波导丝上激励出脉冲信号, 该信号沿波导丝传播时会在波导丝的周围产生脉冲磁场。在液位计的传感器导杆外配有一浮子, 浮子可以沿导杆随液位的变化而上下滑动。在浮子内部有一组永久磁铁。当脉冲磁场与浮子产生的磁场相遇时, 浮子周围的磁场发生改变使得由磁致伸缩材料做成的波导丝在浮子所在的位置产生一个扭转波脉冲, 这个脉冲以固定的速度沿波导丝传回并由超声换能器检出。通过测量脉冲信号与扭转波的时间差可以精确地确定浮子所在的位置, 即液面的位置
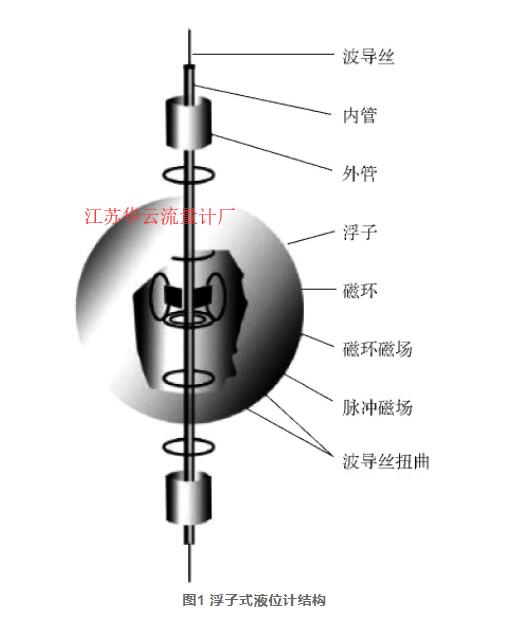

图1 浮子式液位计结构
1.2 系统整体设计
为了方便携带和运输, 一般6 m以上量程的液位计采用柔性软缆材料, 6 m以内量程的液位计采用不锈钢钢管材料。浮子式液位计根据测量精度可分为毫米级和亚毫米级。
1) 系统精度设计。本文针对量程为0~6 m、精度为±1 mm的液位计进行校准。根据计量学理论, 标准装置的精度应该高出被检设备的0.3~1个数量级, 故校准装置精度应不大于±0.3 mm, 长度计量仪器精度应不大于±0.1 mm。
2) 系统功能设计。由于系统对浮子式液位计进行现场校准, 且浮子式液位计多在油库油罐等环境使用, 故所用仪器和装置应具有便携、安装方便、操作简单等特点和防爆等功能。根据现场测试环境, 系统采用提升装置托举浮子模拟浮子在液面的运动。
浮子上下滑动过程中, 因提升装置制造误差等原因, 顶板会发生倾斜, 故应补偿顶板倾斜带来的偏差。液面静止时为水平面, 浮子随液面上下运动, 运动轨迹为铅垂线, 故浮子的移动距离应归算至铅垂线上。由于校准现场光线较暗, 还应考虑测距过程中仪器的精密照准问题。
1.3 系统硬件设计
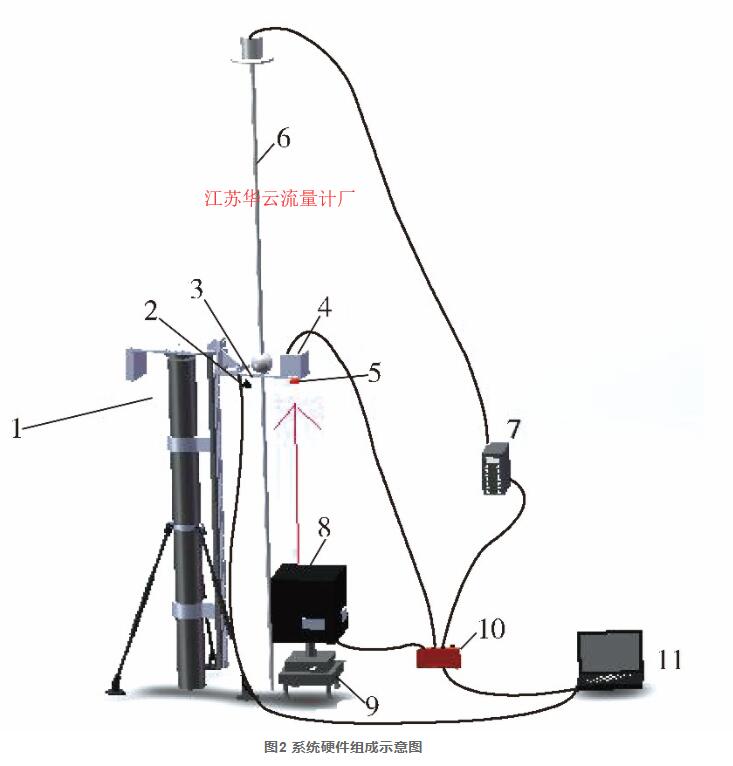
图2 系统硬件组成示意图
1—提升装置;2—摄像机;3—顶板;4—电子倾斜仪 5—反射棱镜;6—浮子式液位计;7—液位计显示器 8—精密测距仪 (内置电子倾斜仪) ;9—可平移基座 10—TLINK控制器;11—PC机
系统硬件由精密测距仪、可平移基座、电子倾斜仪、提升装置以及顶部装置等组成, 如图2所示。提升装置有三个可调节支撑脚, 伸缩杆顶端安置圆水准器, 通过调节支撑脚螺杆将伸缩杆调至铅垂方向。提升装置一端连接顶板, 另一端设置配重, 顶板中间有凹槽, 凹槽可以放入液位计导杆中并托起浮子, 使浮子上下滑动。顶板下部安装测距仪配套的棱镜和摄像机, 上部安装电子倾斜仪。棱镜正下方安装精密测距仪, 由于在测量过程中顶板会发生倾斜导致棱镜发生一定的偏离, 故将测距仪置于可平移基座上, 确保测距仪可以精确地对准棱镜中心。精密测距仪、电子倾斜仪和液位计通过TLINK控制器与计算机连接, 实现仪器的供电、指令的发送和数据的传输。
1.4 系统软件设计
根据液位计原位校准的要求, 软件划分为5个模块, 分别为工程属性模块、垂直度测量模块、联机测量模块、数据解算模块以及数据管理模块。工程属性模块记录液位计的型号、液位计的编号、测量时间、测量地点、测量人员和测量次数等基本信息。垂直度测量模块利用全站仪获取导杆中心点坐标, 通过最小二乘原理拟合导杆的空间轴线并计算其方程, 最终解算拟合轴线的直线度和垂直度
2 系统关键技术
2.1 导杆垂直度测量
液位计在现场安装过程中, 由于加工误差以及人为因素的影响会出现安装误差。如图3所示, 液位计安装完成以后, 液位计的导杆应与铅垂线平行, 由于安装误差导致导杆与铅垂线方向存在夹角θ, 待校准液位计量程为0~6 m、精度±1 mm, 根据误差影响“忽略不计原则”, 液位计竖直时与液位计倾斜时量程差应不超过0.3 mm, 故计算夹角θ。
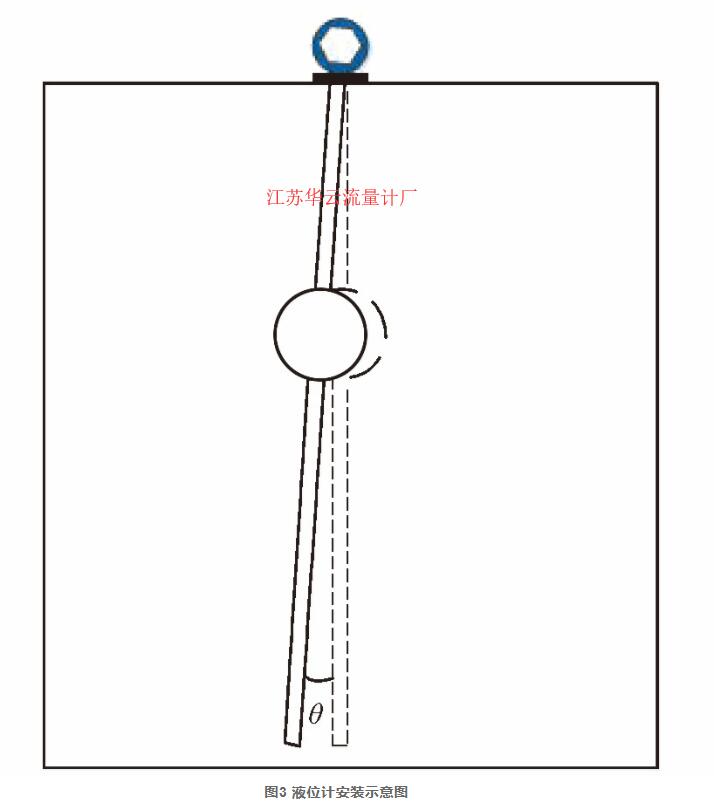
图3 液位计安装示意图
因此, 校准前应首先检验液位计的安装精度, 若液位计垂直度超过0.57°, 则应对液位计重新进行安装。
液位计导杆的截面一般为圆形, 导杆比较细长, 现场无法安装全站仪的反射棱镜和反射片, 因此利用全站仪的无棱镜功能
如图4所示, 距离导杆5 m左右架设全站仪Ti, 用全站仪十字丝的竖丝切准导杆的左边沿, 得到水平角和天顶距角度分别为 (HzL, VL) , 保持垂直角不变, 切准导杆的右边沿得到水平角和天顶距角度分别为 (HzR, VL) , 计算左右水平角的平均值HZ:
将全站仪定位于 (HZ, VL) 处, 启用无合作目标测量, 得到方位角、天顶距和斜距 (HZ, VL, S) 。
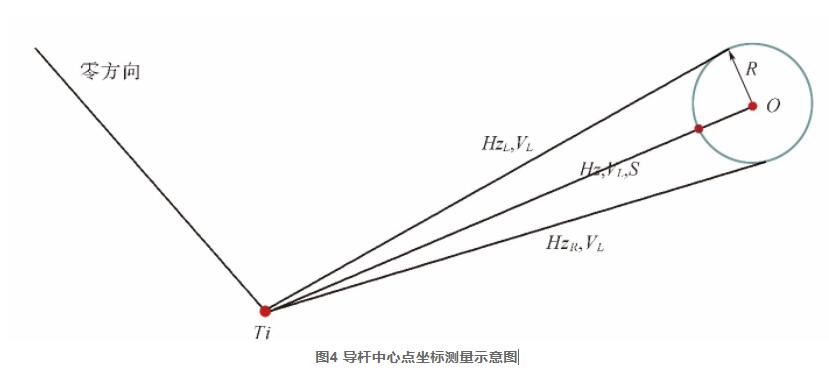
图4 导杆中心点坐标测量示意图
计算得到导杆中心的点坐标Oi (xi, yi, zi) :
式中:R为导杆的半径。
为保证导杆垂直度的测量精度, 应尽可能观测浮子式液位计导杆的全量程范围, 最后将中心点坐标进行直线拟合, 根据直线方程计算出导杆的垂直度。
2.2 精密测距仪数据内插与修正
精密测距仪的精度选用双频激光干涉仪气浮导轨实验装置检定, 装置的不确定度为:U=± (0.2 μm+4.6×10–7L) (L单位为m, K=3) 。因此, 可将干涉仪的测距值作为参考值。
如图5所示, 将棱镜中心与干涉仪的CCR角隅棱镜中心放置在同一高度且位于干涉仪的测距轴线上。调整测距仪位置, 使其测距轴线与干涉仪的测距轴为同一条直线, 以减小阿贝误差
开始时, 小车置于测距仪端, 将干涉仪示值置零, 测距仪测量第一个点, 然后向干涉仪方向移动小车, 每隔0.5 m采集一次数据, 直至小车距离测距仪10.5 m处。将测距仪的相对移动值与干涉仪的参考值进行比对
实验数据及处理结果如图6所示, 经计算均方根误差为RMS=0.14 mm, 测距仪的精度超出了系统要求。
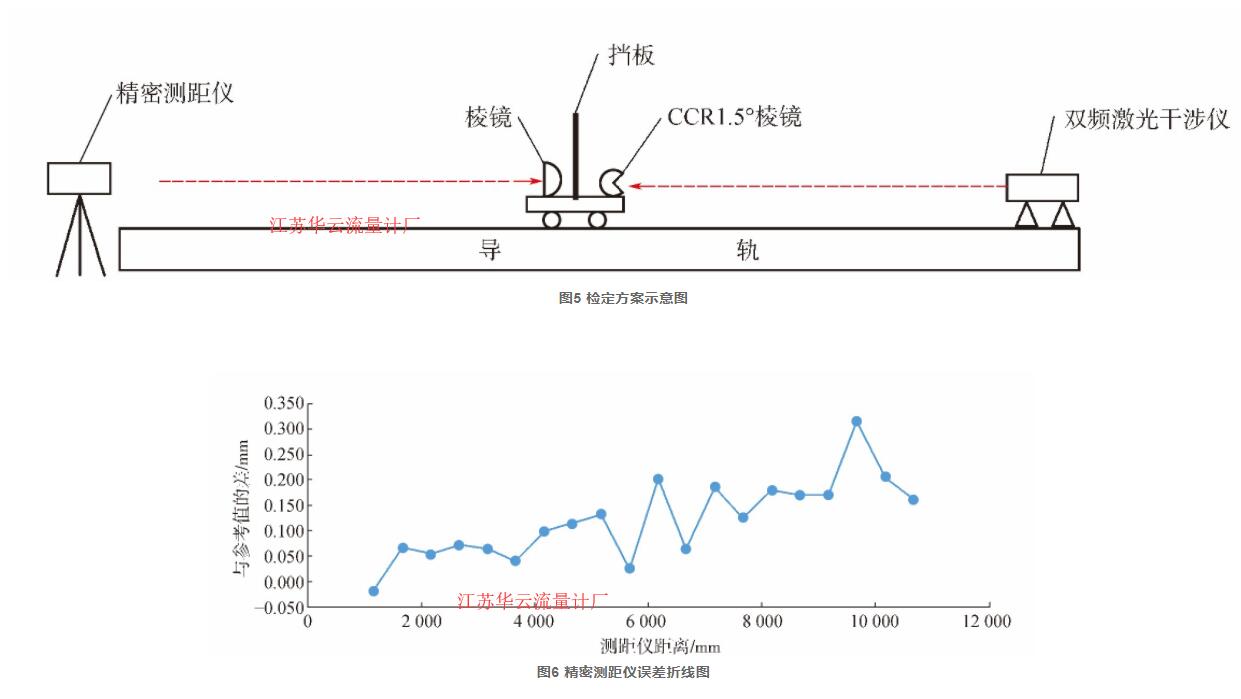
图5 检定方案示意图 图6 精密测距仪误差折线图
从图6中可以看出, 误差期望值并不为零, 误差的分布情况并不符合偶然误差的特点。经过几次重复实验, 测量结果与第一次实验数据差别不大。根据残余误差观察法, 可以确定该测距仪存在系统误差。通过最小二乘法对误差进行线性拟合, 拟合直线的方程为:
式中:x为测距仪距离, m, y为改正值, mm。
经线性改正后的误差分布如图7所示, 改正后的均方根误差为RMS=0.08 mm, 经线性改正后的精度达到0.1 mm的系统要求。
2.3 系统倾斜改正
1) 测距轴线倾斜改正。浮子移动距离应归算至铅垂线上, 但测量时测距轴线与铅垂线存在夹角, 故对测距值进行倾斜改正。如图8所示。
从图6中可以看出, 当测距仪轴线L与铅垂线夹角为α时, 会导致液体深度H测量不准确, 即二者之间存在差值Δ, 其计算式:
式中:α可由精密测距仪内的电子倾斜仪测量得出。
2) 顶部装置倾斜改正。由于提升装置的加工误差、伸缩杆不垂直等原因导致顶板发生倾斜, 引起测距值的偏差, 如图9所示。
若倾斜前与倾斜后顶板之间的夹角为β, 根据棱镜中心至浮子中心的距离D, 由下式可求得顶板倾斜偏差改正值γ。
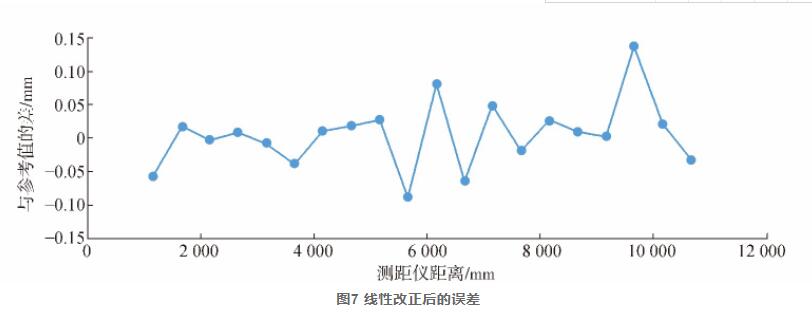
图7 线性改正后的误差
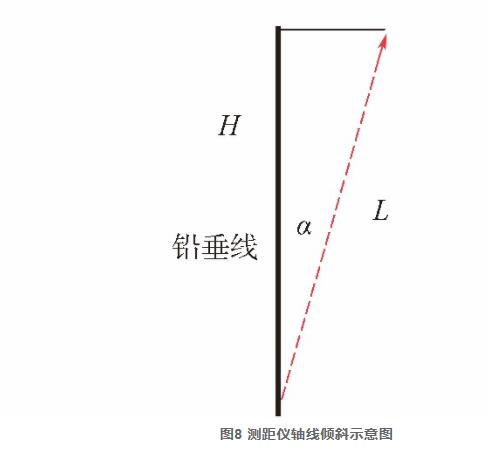
图8 测距仪轴线倾斜示意图
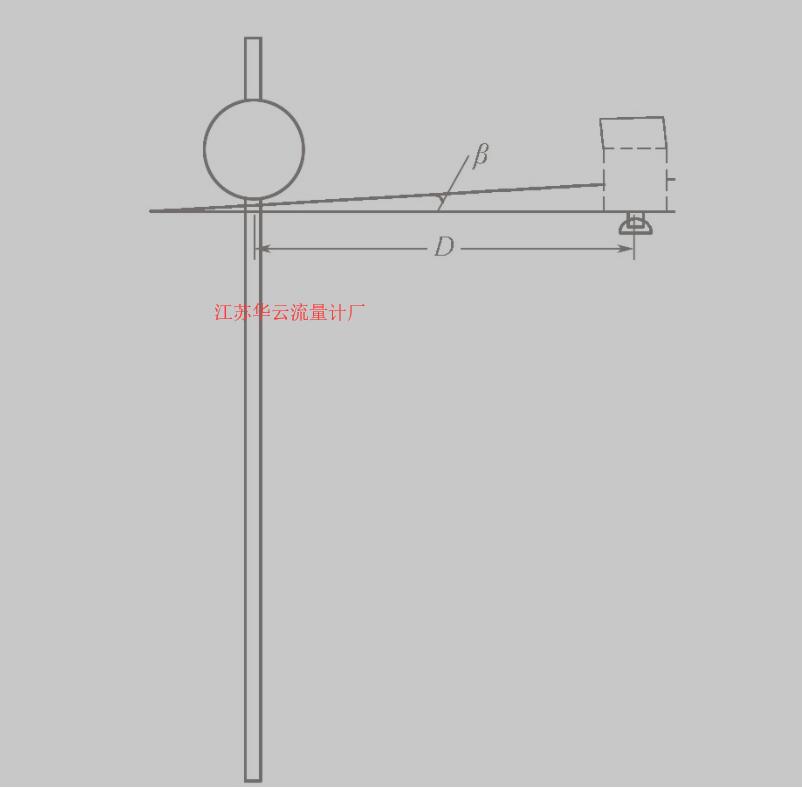
图9 顶板倾斜偏差示意图
3) 实验验证及数据分析。由于实验室内条件的限制, 本文对一个标称精度为±1 mm、量程为3 m的液位计进行了实验测试。实验室内环境温度为20 ℃, 导杆的垂直度为0.346°, 实验数据如表1所示。
为了方便直观判读和分析, 将表1中的数据绘制折线图如图10所示。
1) 系统误差的判别。用不同公式计算标准差比较法判断测量数据是否存在系统误差。
表1 实验测试数据
mm
|
液位计 |
精密测距仪 | 液位值 | 参考值 | 差值 |
|
0.00 |
241.37 | 0.00 | 0.00 | 0.00 |
|
311.33 |
556.65 | 311.33 | 315.28 | -3.95 |
|
517.00 |
762.70 | 205.67 | 206.05 | -0.38 |
|
972.33 |
1 217.14 | 455.33 | 454.44 | 0.89 |
|
1 337.00 |
1 583.70 | 364.67 | 366.56 | -1.89 |
|
1 871.67 |
2 117.69 | 534.67 | 533.99 | 0.68 |
|
2 369.67 |
2 615.99 | 498.00 | 498.30 | -0.30 |
|
2 865.67 |
3 110.62 | 496.00 | 494.64 | 1.36 |
|
2 365.67 |
2 611.35 | -500.00 | -499.27 | -0.73 |
|
1 866.67 |
2 111.52 | -499.00 | -499.83 | 0.83 |
|
1342.00 |
1 586.65 | -524.67 | -524.87 | 0.20 |
|
981.33 |
1 227.32 | -360.67 | -359.33 | -1.34 |
|
584.67 |
830.09 | -396.67 | -397.23 | 0.56 |
|
317.00 |
563.57 | -267.67 | -266.52 | -1.15 |
|
24.67 |
271.04 | -292.33 | -292.54 | 0.20 |
|
RMS=1.40 |
||||
按照白塞尔
按别捷尔斯公式:
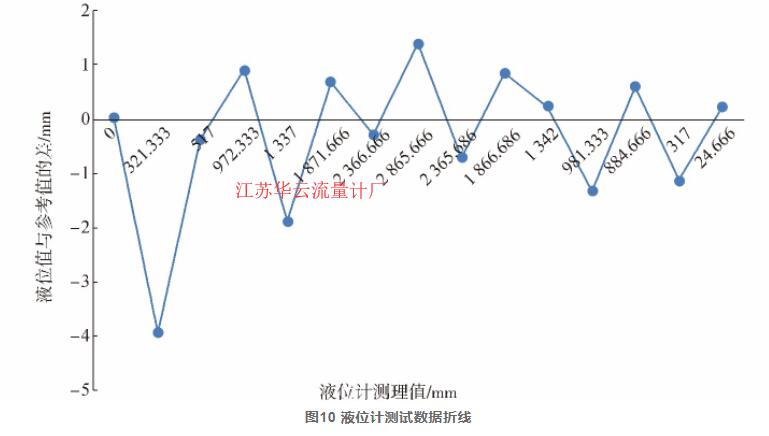
图10 液位计测试数据折线
则说明测量中存在系统误差。
实验数据中,
表2 系统误差分析结果
|
σ1 |
σ2 |
|
|
分析结果 |
|
1.31 |
1.20 | 0.91 | 0.31 | 因为, 未发现系统误差 |
2) 粗差的判别。在测量中, 粗差主要是由测量条件异常变化产生的误差, 一般以异常值或孤值形式表现出来
表3 粗差分析结果
|
ΔMAX |
σ | 3σ | 分析结果 |
|
-3.97 |
1.31 | 3.93 | 因为|ΔMAX|>3σ , 存在粗差, 剔除 |
3) 精度分析。通过实验数据分析得到, 粗差产生的原因是液位计读数出现跳动引起的, 将第一次实验数据的粗差剔除后重新计算均方根误差为RMS=0.94 mm, 液位计测试精度满足其标称精度。通过对精度为±1 mm的浮子式液位计进行原位校准, 验证了校准装置的稳定性和可靠性。
由于条件有限, 本系统只是在室温条件下进行的测试, 没有在低温和高温条件下测试, 如果该系统用来测量高温或低温液体的液位, 性能需要进一步测试, 温度的变化会对系统和液位计精度产生一定的影响
3 结束语
本文设计一套浮子式液位计原位校准系统, 分别对系统的硬件和软件进行介绍, 并详细论述系统的关键技术, 最后对系统进行实验验证和数据分析。系统选用精密测距仪作为标准器, 通过提升装置带动浮子模拟液位变化, 利用TLINK控制器与计算机进行数据交换, 由软件进行数据采集、存储、显示、分析、比对, 自动完成对液位计的校准。该方法不仅减小人员和环境对液位计精度的影响, 而且降低原位校准的难度, 提高工作效率, 为浮子式液位计的原位校准提供一定的参考和借鉴意义。
