

校准涡轮流量计动态响应特性的理论和实施方法
摘要:涡轮流量计传统上只进行稳态校准 , 即只校准其 (稳态 ) 仪表系数。本文阐述了校准涡轮流量计动态响应特性的理论和实施方法。
在武器装备的研制和使用过程中 , 经常遇到非稳态燃油流量问题。 流量是指在稳态或平均流量上叠加有周期或随机的脉动 , 有时还有阶跃形式的扰动。以前传统的做法只对流量计进行稳态校准 , 用这些流量计进行非稳态流量测量时又不进行合理的修正。 其结果必然引入一定的、 甚至很大的误差。 要解决这一问题 ,必须建立一专门装置 , 对流量计的动态特性进行校准亦即动态建模 , 从而为动态测量提供可靠的溯源依据。我国原来在这方面的研究几乎是空白。
我们研制了 “燃油动态流量标准” , 用以解决燃油涡轮流量计动态特性的校准问题。 涡轮流量计的转子(涡轮 ) 轻 , 惯性小 , 较适于进行动态测量 , 在我国航空发动机试车台等场合几乎无一例外地使用它。
1、涡轮流量计的数字模型动态特性校准:
实际上是个动态建模问题。 它的步应当是选择一个合适的数学模型。美国人 J. Grey于 1956年即建立了涡轮流量计的动态模型 [1] , 经变形后模型形式简洁 , 物理意义清晰、 被我们选为动态校准的基础。
在忽略流体的粘度和流量计静摩擦力等影响后 ,可将 Grey模型变形为以下动态方程k2k 3d Ak2 – k K=Ak 1k3K 其中 k= d AV 为质量流; K为涡轮转频; k1(量纲为 cm /g )、 k2(无量纲 ) 和 k3(量纲为 cm ) 是与流量计结构有关的常数。如以体积流 Q= k/d代入 ( 1) , 并定义 Ks= k 2 /( k3 A ) , Kd = A / ( k1k 3d) , ( 1) 式就变为Ks Q2- QK= KdK 。
式 ( 2) 表明 , 涡轮流量计是个一阶非线性系统 , 这符合大量的实验结果和人们对它的一般认识。 如将流量计置于稳态流量中进行校准 , 有 K = 0 , Ks = K /Q=( N /t ) / (V /t ) = N /V , N 为流量计脉冲数 , 我们称 Ks(量纲为脉冲数 /L ) 为流量计的静态仪表系数 , 它和“速度式流量变送器检定规程 JJG198-94” 中定义的仪表系数 K 具有完全相同的量纲和物理意义 ,即: 单位体积校准介质流过流量计时 , 流量计所发出的电脉冲数。如果将流量计置于非稳态流中进行校准 ,K ≠ 0。在一定条件下由激励Q ( t ) 和响应 K ( t ) 可以解析地求出( 2 ) 式中另一个系数 Kd(量纲为 L) 来。
我们将 Kd定义为流量计的动态仪表系数。它是动态校准的对象。它的物理意义如下: 用处于流量计额定量程内的某一稳态流量去激励原本静止的涡轮叶片 , 则当 Kd L流体流经流量计后 , 流量计将完成从静止到***终稳态响应这一过渡过程的 63. 2% (相应线性系统时间常数概念 )。从这一意义上讲 , Kd也是流量计在特定介质中的转动惯量的度量。在流量计额定流量范围内 , 一个流量计的静态系数近似地是常数 , 动态系数近似地也是常数 , 它们与具体的流量值无关。稳态校准的目的是校准 Ks, 动态校准的目的是校准K d , 一旦确定了这两个系数 , 也就确定了流量计完整的稳态和动态特性。
2、动态校准的硬件:
如上节所述 , 要想校准涡轮流量计的动态仪表系数 Kd, 基本方法是用非稳态流去激励流量计 , 然后从其动态响应中抽取有关信息。 由于涡轮流量计是非线性系统 , 必须将式 ( 2) 在一定条件下线性化。
让流量在极短时间内从零上升至稳定值 Q, 式( 2) 中的 Q 就可当作常数处理 , 式 ( 2 ) 也从形式上演变为线性方程 , 其解为K= KsQ ( 1 – e- t /f) ( 3 )其中 f= Kd/Q 可理解为流量计对应于阶跃激励 Q 的“时间常数”。从图 1可见 , f不是常数 , 而只有 Kd= f Q是常数。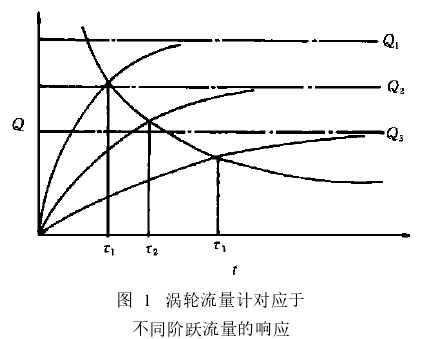

图 1 涡轮流量计对应于不同阶跃流量的响应
如果获得图 1中一族响应曲线 , 就可获得 Kd的估计。由于涡轮流量计转子很轻、 惯性很小 , f值很小 , 一般仅为数十毫秒。 这就要求阶跃激励自身的上升时间应为毫秒量级 , 即应在毫秒量级时间间隔内让流体克服惯性、 阻尼、 摩擦 , 迅速完成从静止到加速到稳定的过程 , 这是极为困难的。如果考虑到流体在加速时有压缩、 振荡等情况 , 就知产生理想的阶跃事实上没有可能。 国外许多实验室在作流量计动态校准时未获成功 ,原因也在此。 为此 , 我们设计了一电磁控制的顶针机构 , 用一直径很小但刚性很大的顶针插入或抽离涡轮叶片空档 , 用以控制涡轮叶片可以或不可以转动。
流量源采用伺服电机驱动计量油缸活塞 , 详见图2。由 PLC 控制各阀门状态切换 ,使稳态校准段关闭、 动态校准段开启。油流由活塞驱动从油缸左侧出来 , 流经流量计后回到油缸另一侧 , 由于开始时顶针处于插入状态 , 涡轮叶片虽受油流推动却被顶针挡住而无法转动 , 因而也没有任何脉冲输出。待油流量稳定后 , 按下操作台上的电控按钮 , 电磁铁吸合 , 顶针抽出 , 涡轮叶片突然处于自由状态 , 开始进入响应于设定油流量 Q的起动过渡过程 , 即涡轮转频由慢到快***后达到稳定的过程。 计算机的动态校准程序控制数字存储示波器完成这一过渡过程信号的采集、 传输、 及数据文件的存储。然后由相应软件计算出该过程的时间常数 f及稳态流量值 Q, 从而得到相应的动态系数 Kd= f Q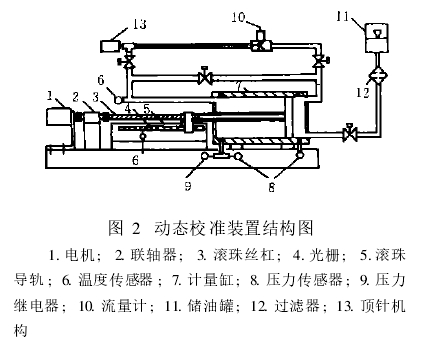
图 2 动态校准装置结构图 1. 电机 ; 2. 联轴器 ; 3. 滚珠丝杠 ; 4. 光栅 ; 5. 滚珠导轨 ; 6. 温度传感器 ; 7. 计量缸 ; 8. 压力传感器 ; 9. 压力继电器 ; 10. 流量计 ; 11. 储油罐 ; 12. 过滤器 ; 13. 顶针机构
不改变流量设定值 Q重复进行校准 , 可以得到相应这量值的多个动态仪表系数及其平均值、 重复性指标 (相对实验标准偏差 )。 顺序改变电机转速 , 使流量计在其额定量程及安全范围内 (过大的阶跃流量可能损坏被校流量计的转动部分 ) 多个流量点重复上述校准 , 就可获得流量计全量程的平均动态仪表系数、线性度和重复性等指标。 由于顶针起不起阻挡作用仅取决于针尖是否离开涡轮叶片的边缘那一瞬间 , 所以尽管电磁铁吸合动作为十毫秒量级 , 但仿真出来的阶跃 “上升沿” 却是极其陡峭的 , 远小于毫秒量级。为使响应过渡过程易于观察及处理 , 我们使用了流量计的正弦输出信号而不是一般稳态校准时的方波信号。
3、动态校准的软件:
动态校准软件是鼠标操作的W IN DOW S应用程序。软件的核心有两点 , 一是控制数字存储示波器 , 以完成动态信号采集 , 另一点是对采集到的动态信号进行处理 , 抽取时间常数 f。 操作员通过屏幕对话框选定信号通道号、 采集点数、 采样间隔、 信号幅度、 预触发时间、 触发电平等参数 , 通过 IEEE488接口设置数字存储示波器并使其处于待触发状态。待阶跃流激励流量计生成过渡过程信号后 , 数字存储示波器被触发并存下该信号。由于信号长度一般设置为 1 32 k B, 而采样间隔一般为 20μs左右 ,所以采集到的信号长达 2. 6 s左右 ,这样长的时间间隔中动态信号早已完成其过渡过程并进入稳态。 通过屏幕对话框操作可将该信号传输到计算机内存 , 或作为数据文件存盘。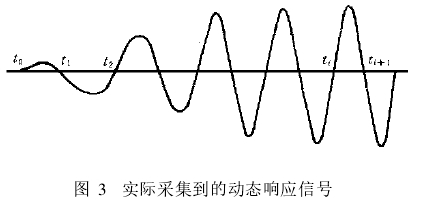
图 3 实际采集到的动态响应信号
采集到的典型动态响应信号参见图 3。从中可以发现其幅值及频率均有指数上升变化的规律。 经理论分析及仿真拟合后确认 , 可用下列公式表示这一过程:Y (t ) = A0 ( 1 – e- t /f1 ) ( 1 – e- t /f2 )sin [2cf0( 1 – e- t /f) t + θ0]
式中: A0、f 0为进入稳态后的幅值和频率 ;θ0为初相角 ,它与流量计起动时涡轮叶片与磁检出头的相对位置有关; f是频率变化过程的时间常数 , f1、 f2为幅值变化过程的时间常数。由于某种力学和电学原因 , 幅值上升过程体现为一个二阶过程 , 而频率变化如式 ( 4) 所示为一阶过程。 数据处理的任务归结为从实际响应曲线中提取频率变化的时间常数 f。
式 ( 4) 表明 , 动态响应是个多参数过程 , 而且对有些参数如 f是非线性的。这使我们无法使用一般的参数估计方法。由于幅值变化实际上无用 , 有用的仅仅是频率变化过程 , 经适当变换和分析 , 我们获得了在***小二乘意义下 f值的***佳估计。一旦获得了 f, 再测定 Q, 就可获得相应的 Kd。
4、动态校准装置的不确定度分析:
从物理机制上看 , 影响流量计动态特性的因素要比影响流量计稳态特性的因素多而复杂。 因为后者是在力平衡条件下的匀速过程 , 而前者是在力不平衡条件下的变速过程。一般来说 , 流量计动态特性指标要比稳态特性指标差很多。基于这种考虑 , 下面有关的不确定度分析将忽略一些次要因素如温度压力修正、 数字存储示波器时基精度、 A/D转换器精度等 ,而只就主要因素作必要的分析。
动态校准的基本方程为 Kd= f Q, 其中 Kd、 f、 Q均为随机变量 , 进行方差分析可得u2c(Kd) = Q2u2(f) + f2u2( Q ) + 2Qfu ( Q ,f)由于Q、 f不相关 , 有( uc( Kd) /Kd)2= (u (f) /f)2+ (u ( Q ) /Q )2( 5
上式右侧项为时间常数测定的相对不确定度 , 第二项为流量测量的相对不确定度。 流量 Q的测量可以采用多种方法 , 本课题采用定时测容积法 , 即 Q= V /t。由专用计数板上的时钟测定时间 , 由光栅测定在此期间计量缸的排量 , 于是有
u ( Q ) /Q )2= ( u ( V ) /V )2+ ( u ( t ) /t )2( 6 )式中右侧项分量已经计量院容量室校准为不超过0. 01% ; 第二项分量取决于计数板的计时精度。 计数板晶振频率为 7. 159 M Hz, 经分频后其时间分辩力为1 m s, 由于总计时时间一般定为 1~ 2 s左右 , 可确保计时准确度达 0. 1% 左右。 于是有
u( Q ) /Q ≈ 0. 1% 至于时间常数 f的查找误差 , 由于其复杂性 (参见节 3) , 很难作出纯理论的分析。为此 , 进行了大量的仿真计算。有充分理由相信 , 对真实信号时间常数的估计的相对不确定度不会明显变差。 现取 (按均匀分布 )u (f) /f= 0. 5% ***后有 uc( Kd) /Kd≈ 0. 5% 由于V、t及 f的分布均近似于均匀分布 , 且其相对不确定度相差不大 , 所以在计算 Kd的相对扩展不确定度时 , 以高斯分布处理。取包含因子 k= 2, 置信水平为 95% , 有
U ( Kd) /Kd= 1. 0%实际校准表明 , 不少涡轮流量计的动态仪表系数Kd可获得近 2% 左右的数据重复性 , 而这里已含有装置重复性和流量计自身的动态重复性两项。
