

CS400C系统稠油井涡轮流量计原理以及企业思路
摘要:为了解决 CS400C 系列的涡轮流量计无法满足稠油生产井的产液剖面测井需要这一问题, 参考 DDL 系列的涡轮流量计的基础上开发研制了用于CS400C 测井系统涡轮仪器, 成功解决了稠油测井的问题。 文章介绍新研制的稠油流量计的工作原理、信号处理和数据通讯电路, 并对设计电路进行了分析。 实际应用表明,**新型仪器工作可靠、误码率低、满足了测井需要。
0 、引言:
CS400C 系统是美国康普乐公司生产的生产测井系统, 由于信号传输方式不同 , 无法与国内常用的DDL 系列的涡轮流量计进行配接 。 由于设计问题 ,CS400C 系列的涡轮仪器设计不适合西部油田稠油生产井的产液剖面测井 ,测井成功率不到 20 %。为了解决稠油产出井的测井生产需要 , 拓展 CS400C 系统仪器适用范围 ,我们参照 DDL 系列的涡轮流量计原理研制了适用于 CS400C 测井系统的稠油产出井涡轮流量计 ,成功实现了系统配接, 经以后的测井生产验证, 提高了稠油产出井的测井成功率 。
1、研制思路:
在涡轮的设计上 ,CS400C 系列的涡轮叶片呈“X”形 ,叶片太稠密, 并且轮轴平面与底座之间只有 0 .5mm 的间隙 , 在稠油井的测井中经常造成粘连卡堵现象 ,这是造成测井成功率低的主要原因 。所以在新仪器的设计中采用了DDL 系列的“S”形涡轮总成 。涡轮流量计的工作原理都基本相同, 都是把经过管子截面的流体线性运动变成涡轮的旋转运动 。所以与当流体轴向流经变送器时, 流体的能量作用在叶轮的螺旋形叶片上 ,驱使叶轮旋转 。叶轮轴上的磁键带动光电传感器中的蝶形遮光片旋转, 使涡轮转速能被光电管检测出来 。但是在信号传输方式上, CS400C 与 DDL 系统有很大的差异 ,DDL 系统数据采集的是涡轮转动的脉冲数 ,CS400C 系统数据采集的是涡轮转动周期量。所以我们在改用“S”形涡轮流量传感器设计的基础上,重新设计了涡轮流量信号的采集、处理及通讯电路 。
2、仪器工作及通讯原理:
重新设计的涡轮流量计采用了 S 型涡轮, 其材质为铝合金,表面喷涂不粘油材料。涡轮流量计原理框图如图 1 所示。涡轮的传感器部分为光电总成 。光电总成的输出经过施密特触发器和信号处理电路的处理后变为标志转速的脉冲和标志方向的电平 。流量计光学部分传感器的遮光板是磁性的, 在涡轮轴上也有一个磁铁 。当涡轮转动时,由于磁场作用的结果 ,遮光板也随之转动 ,于是固定在两个不同位置的光电二极管相继导通或截止,A 、B 两点出现了相差大约 90°的方波 ,并且涡轮每转动一圈,A 、B 两点的方波变化两个周期 。此信号经施密特触发器整形 、信号处理后送到通讯板[ 1]。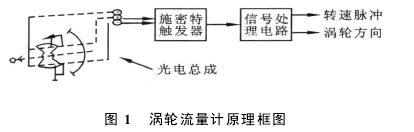

图 1 涡轮流量计原理框图
仪器通讯板主要完成数据的采集处理和接收遥测的寻址地址 、命令并响应地址发送测量数据 。CS400C系统基本数据传输速率为 4 800 b/s 的 11 位串行不归零码 , 即1个起始位 , 8个数据位 , 1个偶校验位和1个停止位 。地址和命令在 25V 的仪器总线上传送, 对于数字 1 表示为 30 V 电平,脉冲幅度为 5 V 。仪器的数据字也在仪器总线上传送, 对于数字 1 表示为 20 m A的电流增加 。仪器工作时, 遥测短节接收来自地面仪器的 11 位串行地址字和 11 位串行命令命令字, 并转换成不归零码传送到仪器总线上。相应地址的仪器响应遥测短节发送的地址,送出 2 个字节的数据, 并通过遥测短节转换成双极性归偏码, 驱动放大后传送到地面仪器 。
3 、仪器信号处理和通讯电路分析:
**新设计的流量计主要由光电总成 、信号处理电路和数据通讯电路三部分组成。信号处理电路原理图如图 2 所示 。涡轮转动一圈, T4 端产生 8 个脉冲, 涡轮转动方向用 CW/CCW(顺时针/逆时针)T5 端点的高低 电平表示 。T4 端的脉冲信号和T 5端CW /CCW 方向输出的信号都送到了通讯 A1 板。在 A1 板上涡轮方向CW/CCW 连到U3(MC14469)的 S7 脚 ,也就是说遥测短节发送的流量计数据, ***高有效位代表涡轮方向 。本流量计涡轮转动一圈 ,电子线路输出 8 个脉冲,并具有方向判别功能。
板上端点 T6 、T8 的信号来自光学部分总成的两道相差 90°的方波 。该信号经施密特触发器U1 整形后, 通过四个微分电路分别送到了双 D 触发器U2 、U3 的置位和复位端。U2 、U3 的输出经过另外四个微分电路后 , 由 U4 分别进行整形。当U1 -3 的输出呈现一个上升沿时 , U2 B -Q 被清零 , 于是 U2 B -Q 输出变为低电平 , C5 开始通过 R 8 充电。起初,U4 输入端 1 、2 电压较低, 输出端 3 为高电平, 随着 C5充电过程不断进行 ,U4 -1 、2 脚电压逐渐上升,当达到 U4 的触发电压时 ,U4 输出迅速反转为低电平 。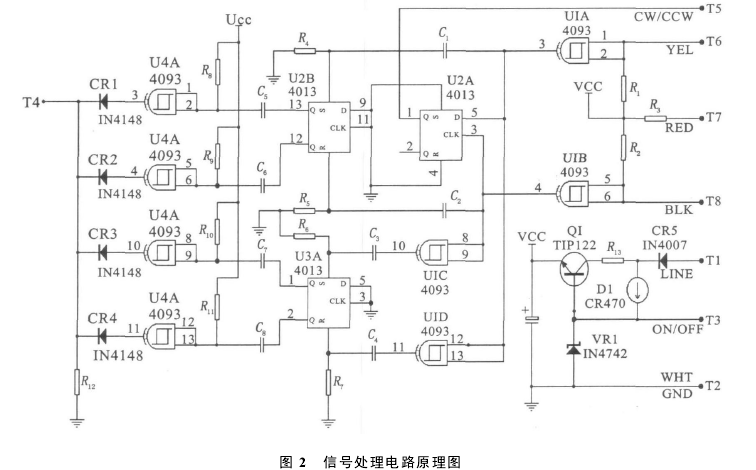
因此U1 -3 每输出一个上升沿,U1 -3 就 出现一个正脉冲 。同样 ,U1 -3 每产生一个下降沿 ,U4 -11就输出一个正脉冲;同理,U1 -4 每产生一个上升沿和下降沿 ,就分别在 U4 -4 和U4 -10 输出一个正脉冲。U4 的四个输出由 CR1 –CR4 或在一起 。
所以 , 对应于 U1 -3 和U1 -4 输出的每一个上升沿和下降沿, 端点T4 都有一个正脉冲出现 。又因为涡轮每旋转一周,U1 -3 和 U1 -4 都变化两个周期 , 各有四个上升 、下降沿, 故涡轮每转一周 ,板上端点T4 有 8 个脉冲输出。
U2 -1 用于鉴别涡轮转向 , 当涡轮顺时针方向转动时 ,U1 -3 超前 U1 -4 π/ 2 , U 2 时钟(即 U 1 -4)的上升沿对应的(U1 -3)输入方波的高电平部分, 所以 U2 -1输出为“1” ;当涡轮逆时针方向旋转时,U4 -3 滞后 U4-4 π/2 , U2 时钟的上升沿对应U1 -3 输入方波的低电平部分,因此 U2 -1 输出为“0” 。即, 当涡轮顺时针旋转时 ,板上端点 T5 输出高电平, 当涡轮逆时针旋转时 ,端点 T5 输出低电平 。
由于 CS400C 测井系统通讯的特殊性 , 我们按照CS400C 的信号格式重新设计了通讯电路 , 成功地实现了地面系统和井下仪器的通讯配接。改造后的通讯电路原理图如图 3 所示。主要由稳压电源 、信号检波驱动电路 、时钟电路 、计数器电路 、数据锁存电路 、清零锁存时钟信号产生电路 、可编程分频电路和通用异步串行通讯电路部分组成 。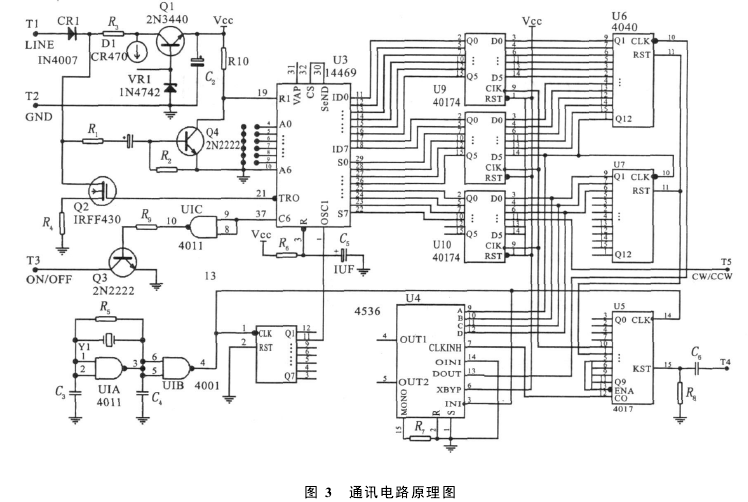
图 3 通讯电路原理图
图 3 中 , 稳压电源、信号检波放大、驱动电路由Q1 、D 1 、V R1 、C 2 、R 3 组成 +12 V 稳压电源 , 给通讯板提供电源 ;Q2 、R4组成信号驱动电路 , R4可调节输出信号脉冲幅度。Q4 、C1、R1、R2、R10组成信号检波放大电路 , 反相放大后的信号送到MC14469 进行接收。时钟电路由 U1 :A 、U1 :B 、U2 组成时钟电路, 分别为不同的 电 路 提 供 工 作 时 钟。 计 数 器 电 路 由 U6(CD4040)、U7(CD4040)组成 16 位计数器。时钟信号由 U4 -13 脚提供, 复位清零信号由 U5 -1 脚产生。数据锁存电路由 U8 、U9 、U10 三个 6 位数据锁存器构成一个 16 位数据锁存器 , 锁存时钟由 U5 -10 脚产生 。U5(4017)为计数器清零、锁存器时钟信号产生电路 。当涡轮转动时, 标志转速的 T4 端脉冲信号送到U5 的复位端 , 在 U5 -14 脚时钟(2 .457 6 MHz)的作用下 ,当第 5 个脉冲到来时 U5 -12(CO)脚输出低电平到 U4 -7(CLKINH), 使 U5 禁止时钟输出 。同时, U5-10(Q4)输出正脉冲到 3 个数据锁存器的时钟端, 使锁存器产生数据锁存 ;当第 6 个脉冲到来时, U5 -1(Q5)输出正脉冲使计数器清零 。之后计数器重新开始计数[ 2]。MC14566 集成电路是16 位或 24 位二进制可编程定时/分频器, 由 U4 -6 脚 8BYP 端控制, 高电平为 16 位, 低电平为 24 位 。A 、B 、C 、D 端口为编程控制段,共 16 种状态, 也就是说, 根据A 、B 、C 、D 端口的状态可以产生 216 个分频值, 从U4 -13 脚(DOUT)输出 ,为计数器提供时钟信号 ,作为脉冲周期测量的基准时钟。MC14469 是通用异步串行数据通讯接口电路[ 3],它完成串行地址命令的接收、地址的判别及数据的发送工作 。
4、结束语:
仪器改造完成后 ,首先在于地面仪进行现场配接,开始地面能够接收到数据但误码较多 , 经认真分析和调整电路后 , 问题得到解决 。原因是 CS400C 系统仪器总线要求地址命令信号幅度为 5 V , 数据信号的幅度为 2 .5 V 。如果数据信号幅度高于 2 .5 V ,那么通讯电路不能将地址、命令和数据信号区分开, 造成误判,出现误码 。通过 5 口井的现场测井试验 ,数据传输稳定 ,仪器工作可靠 ,资料符合要求。
