

科氏质量流量计相位差检测新方法
摘要 基于科氏质量流量计的工作机理和实际工作情况下的信号频谱分析 ,提出了切实可行的相位差检测新方法。设计了改进的 FI R数字滤波器 ,实现了对原始输出信号的实时滤波处理 ,有效地抑制了噪声的干扰 ,为科氏质量流量计的高精度测量提供了保证。 同时该新方法提高了系统的动态品质。 实验结果表明 ,所提出的方法和设计的信号处理系统具有实用价值。
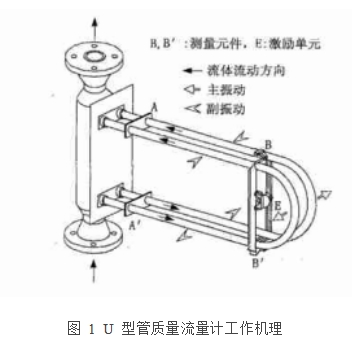

图 1 U 型管质量流量计工作机理
质量流量和相位差的关系为:Qmk= KhBB (1)式中: Qm 为流过管子的质量流量 ( kg /s);k为系统的主振动角频率 ( rad /s);K 为与测量管的形状、尺寸、材料和激励信号等有关的系数 ( kg /s2 );B B′为 , ’ 的相位差 ( rad)。
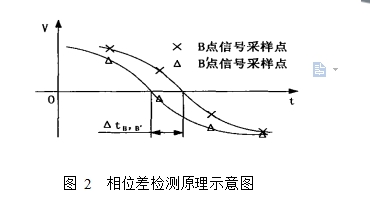
图 2 相位差检测原理示意图
因此 ,作者提出采用数字式过零点的相位差检测新原理 ,即利用 DSP对信号的波形进行时域分析 ,计算出过零点的时间差 ,进而得出信号相位差。

图 3 现场数据处理前的频谱图
由于传统的 3000阶数字滤波器运算量很大 ,在实际的应用中很难实现。 通过对现有比较成熟的数字滤波器的分析和计算机仿真 ,设计了改进的有限冲击响应带通滤波器 ( FIR)来实现实时滤波处理。 带通滤波器结构如图 4所示。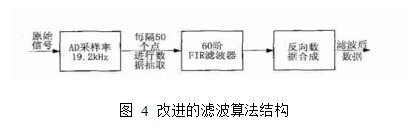
图 4 改进的滤波算法结构
对AD采集的数据人为进行二次采样 ,得到 50个子序列 ,每一数据子序列都相当于原始信号经过频率为 19200 /50= 384Hz采样得到的。 利用标准的 60阶FIR带通滤波器 ( Wn = [ W1 , W2 ]= [0. 1432, 0. 3125 ])对抽取后每一个数据子序列进行滤波 ,对滤波器输出的 50组数据进行反向合成 ,得到***终滤波结果。 每一次滤波运算时 ,并非对 50组数据同时进行 FIR滤波处理 ,而是只对当前一次采样所属的数据子序列进行61次乘法运算和 60次加法运算。
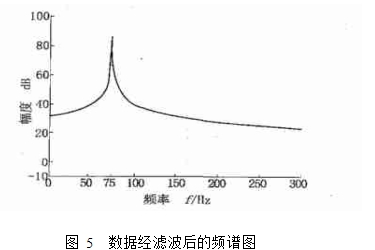
图 5 数据经滤波后的频谱图
改进 FIR带通滤波器提高了信号的信噪比 ,并且两路信号相移相同 ,因此 ,有效地保证了上述相位差检测算法的精度。为了满足系统的实时性 ,系统必须在两次采样时间间隔内 ,完成两路数据的滤波、曲线拟和以及过零点、相位差和频率的计算。
过零点检测算法的结构如图 6所示。通过软件实时检测滤波后数据 ,当出现过零点、相位差和频率的计算。过零点检测算法的结构如图 6所示。通过软件实时检测滤波后数据 ,当出现x ( n )> 0, x ( n+ 1) < 0或者 x ( n ) < 0, x ( n+ 1)> 0,即认为过零点在 x (n )和 x (n+ 1)之间 ,因此将 x ( n )前后各 5个点存储到指定的存储单元 ,为切比雪夫曲线拟和提供原始数据。通过仿真计算 ,采用 2次曲线拟和就可以达到很高的计算精度。拟和后的 2次曲线 ,通过传统的解方程的形式来计算信号的过零点 ,在实际应用中舍弃解方程中在 x ( n )和 x ( n+ 1)之外的那个根。
这样就可以根据两路信号的过零点来计算信号的相位差。 由于系统的采样时间间隔为 52. 08μs ( 1 / 19200 Hz) , DSP(以 TM S320V C33为例 )的运算速度为每个指令周期 17ns,完成一次采样、滤波和相位差算法所需要指令周期为 17ns× 2000= 34μs,所以在采样的时间间隔内 D SP完全可以完成计算 ,保证了系统的实时性。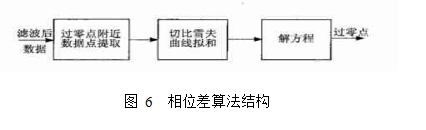
图 6 相位差算法结构
3 、实验结果:
为了验证算法的精度 ,首先 ,在实验室环境下 ,利用 N I-D AQ 6110E两路 16位 DA产生两路正弦信号 ,信号的幅值、频率和两路信号的相位均由计算机设定 , 而且信号上可以根据要求任意叠加进各种干扰信息 , 完全可以模拟现场信号情况。 表 1是根据前面对现场数据的分析 ,由 N I-DAQ 生成的两路正弦信号 ,经过上述算法检测的相位差结果。信号频率 f = 80 Hz,幅值5V ,干扰信号包括频率 f = 160Hz,幅值 0. 5V 正弦信号 , 频率 f = 240Hz, 幅值 0. 1V 正弦信号 , 频率 f = 50 Hz,幅值 0. 2V 正弦信号 ,以及幅值 0. 1V 的白噪声信号。
。
表 1 实际测量结果及其相对误差![]()
![]()
| 检测结果 | ||||||
| 设定的相位差 (°) | 0. 09 | 0. | 27 | 0. 54 | ||
| 计算的相位差 (°) | 0. 09017 | 0. | 26958 | 0. | 54067 | |
| 相对误差 (% ) | 0. 188 | – 0. | 156 | 0. 124 | ||
| 检测结果 | ||||||
| 设定的相位差 (°) | 0. 81 | 1. | 08 | 1. 8 | ||
| 计算的相位差 (°) | 0. 80917 | 1. | 07902 | 1. | 79852 | |
| 相对误差 (% ) | – 0. 102 | – 0. | 091 | – | 0. 082 | |
从测量结果中可以看出 ,相位差测量在小信号时误差***大 ,为 0. 188% 。实际的测量结果初步表明这种检测算法能够实现对相位差的高精度检测。 目前正在利用实际流量标定装置对此套计算方法进行全面的试验研究。
4、结论:
在科氏质量流量计工作原理的基础上 ,对其拾振信号进行了分析 ,设计了新型的 FIR数字滤波器 ,进而提出了一套简单而有效的相位差检测新算法。 仿真和实验结果表明 ,这种相位差检测算法完全达到了预期的设计要求 ,有效地消除了噪声对测量结果的影响 , 提高了系统测量的实时性。 同时发现和验证了传感器由于非线性原因造成拾振信号中倍频信号的存在 ,对分析传感器的非线性具有指导意义。
