

浮子式液位计导杆垂直度测量技术
一、液位计导杆垂直度测量方法:
本项目研究的浮子式液位计采用磁感应方式测量, 不会因为内部结构磨损而降低仪表的使用性能。
浮子式液位计导杆的截面一般为圆形, 而且导杆顶端不方便安设全站仪的反射棱镜。为此充分利用全站仪的无棱镜测量性能, 通过测量一些特征点, 能够快速有效地计算出导杆圆心坐标。
由于导杆的直径一般不大于100mm, 在一定距离上设站, 锁定垂直方向, 只旋转水平方向, 可认为导杆左右两侧边缘位于同一截面上, 故可以采用下列方法间接测量出导杆截面的圆心坐标。
如图1所示, 在距离导杆4m左右的稳固地面架设精密全站仪Ti, 用全站仪十字丝的竖丝切准导杆的左边沿, 测量得到水平角和天顶距角度分别为 (HzL, VL) , 保持垂直角度不变, 用全站仪十字丝的竖丝切准导杆的右边沿测量水平角和天顶距角度, 分别为 (HzR, VL) ;然后计算左右水平角度的平均值Hz:

将全站仪定位在 (Hz, VL) 处, 启动无合作目标测量, 得到方位角、天顶距和斜距 (Hz, VL, S) 。
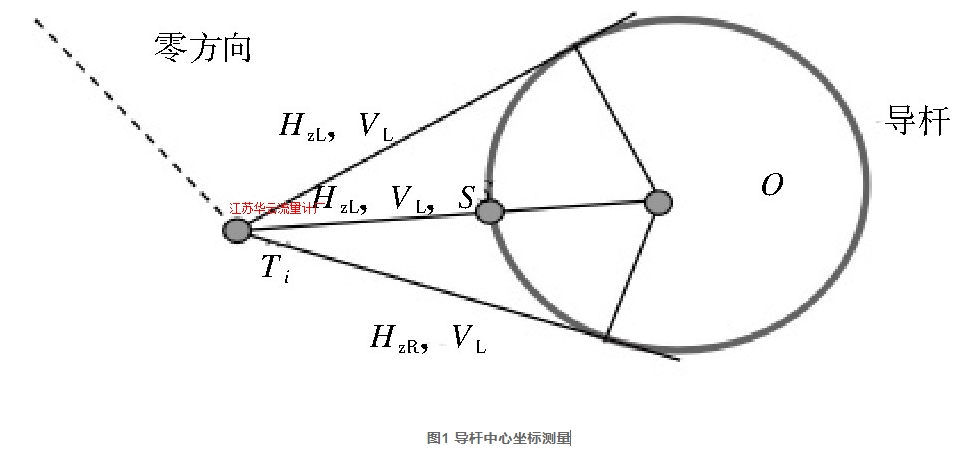
图1 导杆中心坐标测量
由于导杆一般为圆柱体, 其半径R采用千分尺或设计图纸等可以得到, 则导杆中心的三维坐标Oi (xi, yi, zi) 可以计算得到:

注:当VL大于90°时取+, 当VL小于90°时取-。
为保证导杆倾斜度的测量准确度, 测量前选择合适的设站位置, 尽可能观测浮子式液位计导杆的全量程范围, 用全站仪从下而上按照上述测量方法依次测量各个截面的中心点三维坐标, 共测量N (N≥5) 个截面的, 并记录测量数据。相邻测量截面的距离以 (200~500) mm为宜, 导杆中心点***少测量点数不少于5个。
二、数据处理:
1. 空间直线拟合算法
空间直线拟合其基本思路是首先得到其标准空间数学方程, 将空间点坐标代入后建立误差方程, 由误差方程得到法方程后, 再求解空间直线的参数。具体理论推导过程如下:
空间直线的方程可以简化为

要求的参数为:x0, y0, m, n。
直线方程可以简化为

将直线方程写成矩阵形式为

当有第n个点时, 第i个点的方程为
并联n个方程得到如下方程:

进行***小二乘拟合得到方程:
***后化简式 (2) ~式 (5) 得到:

***后, 将数据代入式 (7) 可求得经过***小二乘拟合后的空间直线的直线方程和空间直线的直线向量 (m, n, 1) 。
2. 空间直线的直线度算法:
根据GB/T11336-2004《直线度误差检测》中直线度的定义可知, 直线度误差为实际直线对其理想直线的变动量, 理想直线的位置应符合***小条件。
直线度误差的评定方法有:***小包容区域法、***小二乘法和两端点连线法。其中***小包容区域法的评定结果小于或等于其他两种评定方法。
(2) ***小二乘法
式中:φfLS——***小二乘中线包容圆柱面的直径。
以***小二乘中线lLS作为评定基线 (或基线方向) 的方法, 按此方法利用式 (8) 求得直线度误差值fLS。对任意方向的直线度误差如图2所示。
本软件采用***小二乘法对直线度误差进行评定, ***小二乘法具体步骤为 (1) 求得拟合后空间直线的直线方程; (2) 将原始坐标数据代入空间直线方程, 求得每个点坐标与空间直线的距离; (3) 求得点坐标与空间直线***大的距离; (4) 根据***小二乘法求得空间直线的直线度误差值。
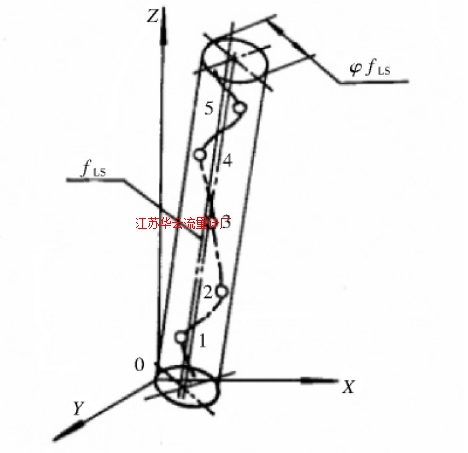
图2 ***小二乘法直线度误差图
3. 导杆垂直度计算方法:
已知两个非零向量a→和b→, 求两个向量之间的夹角公式如下:
已知直线的方向向量为a→= (m, n, 1) , 取坐标轴Z轴的一个方向向量为b→= (0, 0, 1) , 通过式 (10) 可求得直线与Z轴之间的夹角余弦。
再对式 (10) 求反余弦即可得到空间直线与Z坐标轴之间的夹角。
三、准确度分析:
对液位计进行垂直度的测量可得到的导杆中心点坐标。
通过液位计自动检校软件对上述坐标进行空间直线拟合, 并求解拟合直线的直线度和垂直度。解得液位计导杆直线度为27.35mm, 垂直度为0.322°。此液位计的直线度偏大, 为了保证结果的可靠性, 又利用Matlab软件对以上坐标进行处理, 处理结果如图3所示。
表1 导杆中心点坐标

通过图3可以看出, 液位计导杆在量程中点 (3m) 附近出现弯曲, 使中点附近坐标点距离拟合直线的距离较大, ***终导致直线度过大。全站仪测量高度为4196- (-842) =5038mm, 5038×sin0.322°=28.3mm。点坐标的X轴和Y轴分别与***后一点坐标的X轴和Y轴相差10mm和21mm, 根据公式 结果与28.3mm相差不大, 再考虑拟合直线并不一定通过两坐标点, 故可认为求解的导杆垂直度正确。
结果与28.3mm相差不大, 再考虑拟合直线并不一定通过两坐标点, 故可认为求解的导杆垂直度正确。
四、结束语:
本文对DL1000精密测距仪的内符合准确度和外符合准确度进行了测试, 并在误差分析中发现该测距仪存在系统偏差。为了进一步提高测距仪的准确度, 本文通过对误差进行拟合, 求解拟合函数, 内插求得误差改正值的方法对误差进行了修正。***后通过验证得出, 利用对误差进行拟合和内插的方法, 能够减弱系统偏差的影响, 使测距仪在9m范围内达到了0.1mm的准确度, 满足了液位计校准系统对近距离、高精度测距的要求。
图3 空间点坐标示意图
