

低功耗两线制涡轮流量计
| Q= | f(/ | 或 | 3/) | () |
| Ls | m s | 2 | ||
| K |
3、硬件系统低功耗设计:
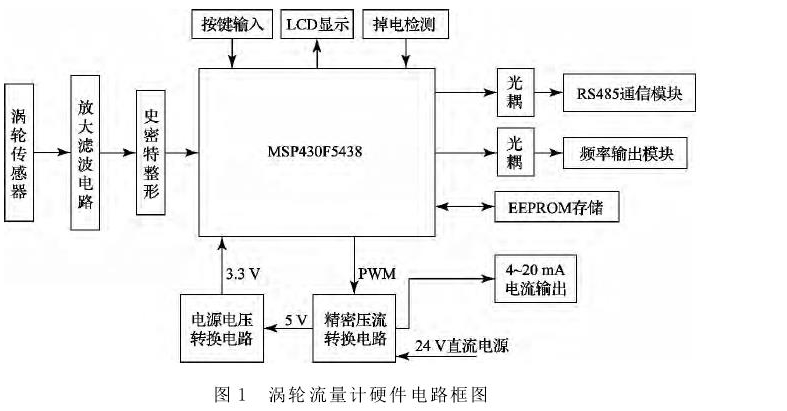

系统的硬件框图如图1所示。主要由涡轮传感器、放大滤波电路、电压跟随器、单片机、人机接口电路、4~20mA输出、电源管理电路、频率输出和RS485通信组成。
对流量信号的测量充分使用了 MSP430单片机内部的资源,即 A/D转换器、比较器、定时/计数器等,节省了所需单片机的口线和外围器件。AD7391芯片将数字信号转换为电压信号,再经过由 XTR115组成的V/I转换电路输出4~20mA 电流信号。电源转换模块将24V 转换为5V、3.3V 和2.048V,满足运算放大器、单片机以及其他芯片的供电需求。 单片机和 V/I转换电路构成4~20mA 变送器,变送器的耗电电流随传感器输出而变化,电流表只需要正确串联在电路中即可测量出电流值,其数值通过计算可以得到当时的瞬时流量值。
3.1 单片机芯片的选型
在众多方法中,器件选型无疑对低功耗设计的实现起到***关键的作用。系统采用了 TI公司推出的16位超低功耗的 MSP430F5438作为主控芯片,主要在于 MSP430系列芯片的功耗优势[12]。
由活跃模式下电流消耗相对于系统频率:
| IAM =I′AM ×fsystem | () | |
| 3 | ||
| 由活跃模式下电流消耗相对于供电电压: | ||
| ( | ) | () |
| IAM =I′AM +175× Vcc-3 | 4 | |
图2 各模式转换框图
由图2可知,MSP430在不同模式下的功耗相差很大,较低功耗0.1μA,在活动模式下的功耗取决于系统的工作频率与供电电压,特别是系统频率。当系统主时钟频率为1MHz时,工作电压为3V,电流消耗为370μA,根据式(4)和(5)可计算出,当系统工作频率为4MHz,工作电压3.3V,电流消耗相当于1.69mA。因此,系统在运行时,根据涡轮信号的变换率,选择不同的工作模式,以降低系统的功耗。
3.2 4~20mA输出和电源供电模块功耗问题一直是4~20mA 输出电路设计的难点之一。解决这一问题的主要方法是信号线与电源线复用。这样功耗问题得以保证,并且为仪表两线制工作提供足够的电流。但经过实际测试,当单片机处于高频时钟工作,并且所有外设全部工作,其电流消耗超过4mA。为了解决这样的问题,通过DC/DC对复用线进行分流,还解决了数字部分的供电问题[13-14]。此外,流量计的硬件电路设计均采用低功耗的器件,这也是降低整体功耗的方法之一。
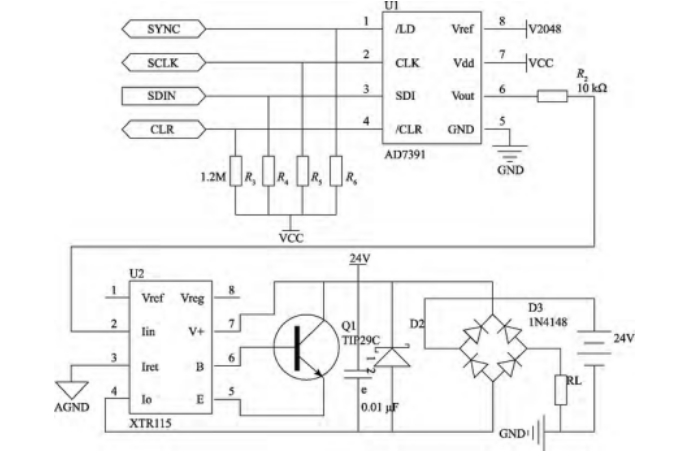
电流环输出部分的核心是 TI公司的XTR115电流环芯片,电路如图3所示。引脚3被看作模拟地,输入端电阻Rin为10kΩ,C 为降噪电容,晶体管的选型主要考虑 NPN型,冲击电压,电流以及功耗,鉴于会有温度传导效应,***好不使用贴片的封装,外接晶体三极管 Q1 只要选用Vceo>36V,Icmax>32mA,Poutmax>1.2W的 NPN三极管即可,可以考虑下面的一些型号:TIP29C,2SC1846。
该电路的工作原理是当AD7391数模转换芯片的6脚输出电压 信 号 经 过 R2 转 换 成 40~200μA 的 输 入 电 流,XTR115内部有一个100增益的运放,将输入电流放大为4~20mA的电流。
外部晶体管 Q1主要作为一个电流输出源,如果使用24V和20mA 的电流输出,此晶体管的功耗为0.48W,XTR115通过采用外部的晶体管来避免产生温飘,所以在安装晶体管的时候应该避免和模拟部分的电路离的太近,包括XTR115。在实际电路中,还需给功率管装上合适的散热器。
| 图 | 3 | 电流环输出电路 | ||||||||||||||||||||||||||||||||||||
| XTR115 | 允许各种电压保护方法,图 | 3 | 显示了一个二 | 证明,即使电源电压高达 | ,也损坏不了 | 。 | ||||||||||||||||||||||||||||||||
| 50V | XTR115 | |||||||||||||||||||||||||||||||||||||
| 极管电桥电路,四个 | 1N4148 | 型开关二极管构成这样的保 | 鉴于整个系统自身的电流消耗不能超过 | ,所以 | ||||||||||||||||||||||||||||||||||
| 4mA | ||||||||||||||||||||||||||||||||||||||
| 护电路,电路可以正常运行,甚至当电压连接线是接反的, 通过 | / | 对复用线进行分流, / | 的 | 输入电压为 | ||||||||||||||||||||||||||||||||||
| DCDC | DCDC | |||||||||||||||||||||||||||||||||||||
| 它也能防止负电压流入 | V+ | 端。因为桥式电路中无论何 | ,输出电压为 | ,所以,当 | / | 效率为 | 80% | 以上 | ||||||||||||||||||||||||||||||
| 24V | 5V | DCDC | ||||||||||||||||||||||||||||||||||||
| 时都会导通两只二极管,于是,在计算环路电压时,去掉两 | 时,从电流环上取 | 1mA | 电流,由公式()计算出提供给数 | |||||||||||||||||||||||||||||||||||
| 6 | ||||||||||||||||||||||||||||||||||||||
| 只硅二极管的正向压降 | (约为 | )是理所应当的,由式 | 字电路的电流为 | ,这样不仅解决了电流环上的电 | ||||||||||||||||||||||||||||||||||
| 1.4V | 3.84mA | |||||||||||||||||||||||||||||||||||||
| ()确定。 | 流大于 | 4mA | 的问题,而且解决了电路中芯片的供电问题。 | |||||||||||||||||||||||||||||||||||
| 5 | ||||||||||||||||||||||||||||||||||||||
| VLOOP =24-I0RL -1.4 | () | · · | · | () | ||||||||||||||||||||||||||||||||||
| 5 | Vi Ii | η=V0 I0 | 6 | |||||||||||||||||||||||||||||||||||
| 为了 防 止 瞬 态 电 压 过 高, | 公 司 生 产 的 | 由于流量仪表采用二线制 | 24V | 环 | 路供电,单片机 | |||||||||||||||||||||||||||||||||
| Motorola | ||||||||||||||||||||||||||||||||||||||
| P6KE39A | 型抑制器的各项参数都符合要求,其阈值电压 | 供电,信号调理电路中运放 | LM258 | 需要 | 5V | 电源供 | ||||||||||||||||||||||||||||||||
| 3.3V | ||||||||||||||||||||||||||||||||||||||
| 为 | ,钳位时间仅为 | ,其性能是齐纳稳压管所不及 | 电。为了降低电路功耗,使用 | TI | 公司的电压转换芯片 | |||||||||||||||||||||||||||||||||
| 39V | 1ns | |||||||||||||||||||||||||||||||||||||
| 的。只要环路电压高于 | 39V | 就会被钳位。 | 通过测试数据 | ,将 | 24V | 转换为 | ,用芯片 | TPS79733 | 将 | 5V | 转 | |||||||||||||||||||||||||||
| LM3103 | 5V | |||||||||||||||||||||||||||||||||||||
| 换为 | ,***后用芯片 | REF3020 | 将 | 3.3V | 转换为 | 2.048 | ( | )/( | +R10 | ) | () | ||||||||||||||||||||||||||||||||||||||||||||||
| 3.3V | Vout =0.6× | R8 +R9 +R10 | R9 | 7 | |||||||||||||||||||||||||||||||||||||||||||||||||||||
| ,作为 | / | 转换芯片的参考电压。 | 芯片输出电 | Vout | 为 | , | 、 | 分别选为 | 10kΩ | 和 | ,根据式 | ||||||||||||||||||||||||||||||||||||||||||||||
| V | DA | LM3103 | 5VR8 R9 | 1.3kΩ | |||||||||||||||||||||||||||||||||||||||||||||||||||||
| 压由外部电阻 | R8 | 、 | 和 | R12 | 决定。调整输出电压公式为: | ()计算出 | R10 | 约为 | 。 | 转 | 5V | 电路如图 | 4 | 所示。 | |||||||||||||||||||||||||||||||||||||||||||
| R9 | 7 | 69Ω 24V | |||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 换为 | ,***后用芯片 | REF3020 | 将 | 3.3V | 转换为 | 2.048 | ( | )/( | +R10 | ) | () | ||||||||||||||||||||||||||||||||||||||||||||||
| 3.3V | Vout =0.6× | R8 +R9 +R10 | R9 | 7 | |||||||||||||||||||||||||||||||||||||||||||||||||||||
| ,作为 | / | 转换芯片的参考电压。 | 芯片输出电 | Vout | 为 | , | 、 | 分别选为 | 10kΩ | 和 | ,根据式 | ||||||||||||||||||||||||||||||||||||||||||||||
| V | DA | LM3103 | 5VR8 R9 | 1.3kΩ | |||||||||||||||||||||||||||||||||||||||||||||||||||||
| 压由外部电阻 | R8 | 、 | 和 | R12 | 决定。调整输出电压公式为: | ()计算出 | R10 | 约为 | 。 | 转 | 5V | 电路如图 | 4 | 所示。 | |||||||||||||||||||||||||||||||||||||||||||
| R9 | 7 | 69Ω 24V | |||||||||||||||||||||||||||||||||||||||||||||||||||||||
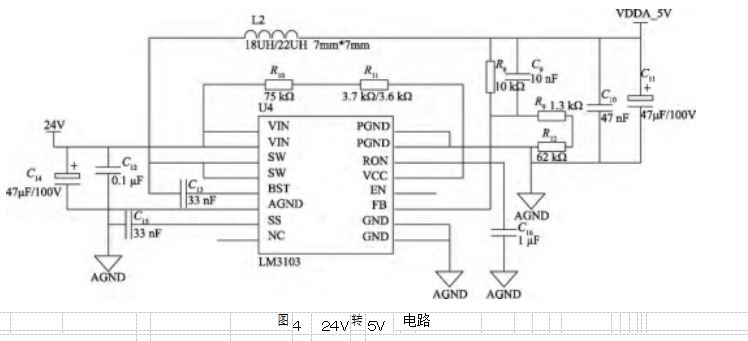
图 4 24V 转 5V 电路
| 3.3 | RS485通信模块 | 据;按键中断用来设置仪表各种参数。系统软件框图如5 | |||||||||||||||||||||||||
| 抗干扰能力是考察仪表的一项关键指标。为了减 | 所示。 | ||||||||||||||||||||||||||
| 少通信信号受外界干扰,通信模块电路采用东芝公司的 | |||||||||||||||||||||||||||
| P181 光 耦 隔 离 器 和 75LBC184 差 分 收 发 器 芯 片。 | |||||||||||||||||||||||||||
| 75LBC184差分收发器带有内置瞬变噪声保护装置,这 | |||||||||||||||||||||||||||
| 种设计特点明显改善了减少数据异步传输电缆上的瞬 | |||||||||||||||||||||||||||
| 变噪声的可靠性,这种可靠性是市场上现有器件所不及 | |||||||||||||||||||||||||||
| 的。远程计算机可以通过 RS485通信模块及时了解涡 | |||||||||||||||||||||||||||
| 轮流量计的流量参数。 |
 |
||||||||||||||||||||||||||
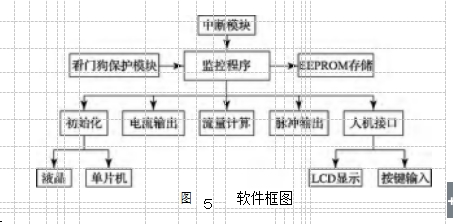
| 4 | 系统软件设计 | 图 | 5 | 软件框图 | |||||||||||||||||||||||
| 系统软件包含的主要功能模块有:)初始化模块:系 | |||||||||||||||||||||||||||
| 1 | 脉冲计数 | ||||||||||||||||||||||||||
| 统上电后,首先就要对单片机的状态控制寄存器及各功能 | 4.1 | ||||||||||||||||||||||||||
| 设置定时器 | ( )来捕获涡轮信号脉冲个数,设置 | ||||||||||||||||||||||||||
| 模块的工作模式进行设置, | 使用之前也需要对其进行 | ||||||||||||||||||||||||||
| ATA | |||||||||||||||||||||||||||
| LCD | 定时器 | ( )来计算瞬时流量、累计流量和频率输出。捕 | |||||||||||||||||||||||||
| 复位和初始化显示。 )计算处理模块:计算出传感器信号 | |||||||||||||||||||||||||||
| BTB | |||||||||||||||||||||||||||
| 2 | 获/比较 寄 存 器 | 被 设 置 为 | ,辅 助 时 钟 | ||||||||||||||||||||||||
| 的频率,然后,根据所设定的仪表系数,计算出瞬时流量和 | TACCRO | ||||||||||||||||||||||||||
| 32767 | |||||||||||||||||||||||||||
| 和累计流量,再根据计算出来的瞬时流量,向外发送相应 | ACLK | 频率选用 | ,定时器 | A | 工作在增计数模式。 | ||||||||||||||||||||||
| 32768Hz | |||||||||||||||||||||||||||
| 的脉冲量和标准的 | 的电流。 )输出模块:系统 | TB | 设置捕获/比较寄存器 | TBCCRO | 为 | ,选用系统时 | |||||||||||||||||||||
| 4~20mA | 65535 | ||||||||||||||||||||||||||
| 3 | 钟 | 分频后的频率为 | ,定时器 | 工作在连续模式。 | |||||||||||||||||||||||
| 输出模块即远程信号发送操作模块,分别是4~20mA 电 | 4 | 2 | B | ||||||||||||||||||||||||
| MHz | |||||||||||||||||||||||||||
| 流输出操作和脉冲输出操作。 )人机接口模块:模块由键 | TA | 的上升沿来触发捕获脉冲信号, | 根据相邻两次触发 | ||||||||||||||||||||||||
| TB | |||||||||||||||||||||||||||
| 4 | 信号的间隔时间来捕获涡轮信号脉冲个数,再依据 TB的 | ||||||||||||||||||||||||||
| 盘和 | LCD | 组成,用于显示和修改仪表测量结果。 )中断模 | |||||||||||||||||||||||||
| 5 | 工作时钟频率计算出涡轮信号的频率,流程图如图 6 | ||||||||||||||||||||||||||
| 块: | 中断负责频率的测量; | 中断负责脉冲 | |||||||||||||||||||||||||
| TimerA | TimerB | ||||||||||||||||||||||||||
计数、流量计算显示和RS485通信;掉电中断用来保存数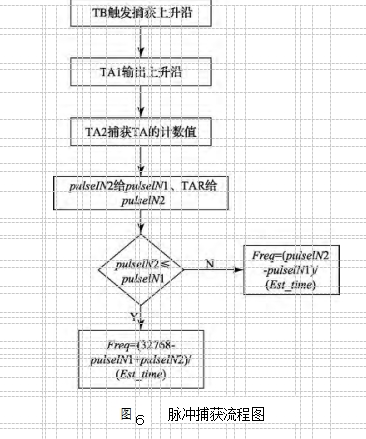
| 图 | 6 | 脉冲捕获流程图 |
| 当 | pulseIN2≤pulseIN1 | 时,频率计算公式为: | |||||||||||||||||||||
| 32768-pulseIN1+pulseIN2 | |||||||||||||||||||||||
| freq= | () | ||||||||||||||||||||||
| _ | 8 | ||||||||||||||||||||||
| Esttime | |||||||||||||||||||||||
| 当pulseIN2>pulseIN1时,频率计算公式为: | |||||||||||||||||||||||
| freq= | pulseIN2-pulseIN1 | () | |||||||||||||||||||||
| _ | 9 | ||||||||||||||||||||||
| 式 中: | Esttime | ||||||||||||||||||||||
| 、 | 为 计 数 脉 冲 浮 点 型 变 量, | ||||||||||||||||||||||
| ulseIN1 | ulseIN2 | ||||||||||||||||||||||
| p | p | 为捕获的涡轮脉冲数。 | |||||||||||||||||||||
| _ | 为计算瞬时流量时间, | ||||||||||||||||||||||
| Esttime | re | ||||||||||||||||||||||
| f | q | ||||||||||||||||||||||
| 4.2 非线性补偿设计 | |||||||||||||||||||||||
| 采用计算和查表相结合的插值法来处理涡轮传感器 | |||||||||||||||||||||||
| 的非线性问题。插值法就是在传感器输出频率 | F | 与仪表系 | |||||||||||||||||||||
| 数K 的特性曲线中,把输出频率F 分成N 个均匀的区间, | |||||||||||||||||||||||
| 这样每个区间的端点 | 都对应一个输出 ,测定完这些数 | ||||||||||||||||||||||
| Fi | |||||||||||||||||||||||
| Ki | |||||||||||||||||||||||
| 据点( | , ),其中, | ,,… 。按偏差平方和***小原则 | |||||||||||||||||||||
| Fi | Ki | i=12 | n | ||||||||||||||||||||
| 求出近似曲线 | k | (),并且采取二项方程为拟合曲线方 | |||||||||||||||||||||
| =φ | f | ||||||||||||||||||||||
| 法,然后把近似曲线方程表达式预先存入到微控制器中, | |||||||||||||||||||||||
| 显然当曲线上任一点 | Fx | 检索到在( , | )之 | 间或端点 | |||||||||||||||||||
| Fi Fi+1 | |||||||||||||||||||||||
| 处,就可以根据函数表达式计算出与之对应的仪表系数 | |||||||||||||||||||||||
| , | 的计算表达式为: | ||||||||||||||||||||||
| Kx Kx | |||||||||||||||||||||||
Kx = Ki +k(Fx -Fi)= Ki +Ki+1 -Ki(Fx -Fi)![]()
![]()
Fi+1 -Fi
(10)
式中:i=1,2,3,…,n;Fx 为当前频率值,其值介于Fi 和
Fi+1 之间。
实际使用线性插值时,线性化的误差与检测点的数量和位置相关。通过增加测量点数和选择***佳位置来得到***好的的效果。
| 5 | 实验及结果分析 | |||||||||||||||||||||||||||||||
| 5.1 | 模拟电流输出实验 | |||||||||||||||||||||||||||||||
| 本系统对仪表设定仪表系数,量程流量,将信号发生 | ||||||||||||||||||||||||||||||||
| 器输出信号的幅值调节到表1中的响应值,合上开关将信 | ||||||||||||||||||||||||||||||||
| 号频率依次调节到量程频率的 | 100% | 、 | 、 | 、 ,记 | ||||||||||||||||||||||||||||
| 75%25%0% | ||||||||||||||||||||||||||||||||
| 录下各测试点的数字电流表的示值,由式( | )计算出电流 | |||||||||||||||||||||||||||||||
| 11 | ||||||||||||||||||||||||||||||||
| 相对误差。 | ||||||||||||||||||||||||||||||||
| I示i -I理i | ×100% | ( ) | ||||||||||||||||||||||||||||||
| i= | I理i | 11 | ||||||||||||||||||||||||||||||
| 式中: | i | 为第 | 试验点的电流输出误差; | 理 | 为第 | 试验点 | ||||||||||||||||||||||||||
| i | Ii | i | ||||||||||||||||||||||||||||||
| 的输出电流理论值; | 示 | 为第 | 试验点的输出电流实际值。 | |||||||||||||||||||||||||||||
| Ii | i | |||||||||||||||||||||||||||||||
| 表 | 1 | 输出电流相对误差 | ||||||||||||||||||||||||||||||
| 电流测量值/ | ||||||||||||||||||||||||||||||||
| 信号幅值 | K | 系数 | mA | |||||||||||||||||||||||||||||
| 量程频率 量程频率 量程频率量程频率 | ||||||||||||||||||||||||||||||||
| / | / · | -1 | ||||||||||||||||||||||||||||||
| mV | P L | 100% | 75% | 25% | 0% | |||||||||||||||||||||||||||
| 10 | 4000 | 20.000 | 15.992 | 7.993 | 3.996 | |||||||||||||||||||||||||||
| 20 | 500 | 19.998 | 15.992 | 7.995 | 3.996 | |||||||||||||||||||||||||||
| 30 | 80 | 19.998 | 15.990 | 7.995 | 3.995 | |||||||||||||||||||||||||||
| 电流/ | 20 | 16 | 8 | 4 | ||||||||||||||||||||||||||||
| mA | ||||||||||||||||||||||||||||||||
| ***大误差 | ||||||||||||||||||||||||||||||||
| ( ) | -0.01 | -0.062 -0.087-0.125 | ||||||||||||||||||||||||||||||
| % | ||||||||||||||||||||||||||||||||
| 从表1可看出,本系统所设计的仪表输出电流相对误 | ||||||||||||||||||||||||||||||||
| 差不超过0.2%,符合工业设计要求。 | ||||||||||||||||||||||||||||||||
| 仪表系数修正实验 | ||||||||||||||||||||||||||||||||
| 5.2 | ||||||||||||||||||||||||||||||||
| 在检定装置上 对口径为 | 涡轮流量传感器分别 | |||||||||||||||||||||||||||||||
| , | 20mm | |||||||||||||||||||||||||||||||
| 使用平均系数法和线性插值法进行标定,并与标准值进行 | ||||||||||||||||||||||||||||||||
| 比较,结果见表 | 。量程范围为( | 3/ | 3/)涡轮 | |||||||||||||||||||||||||||||
| 2 | 0.7m | h~7.0m | h | |||||||||||||||||||||||||||||
| 流量传感器的平均仪表系数由( | )式计算得到。 | |||||||||||||||||||||||||||||||
| 12 | ||||||||||||||||||||||||||||||||
| 表 | 2 | 平均系数法和线性插值法的比较 | ||||||||||||||||||||||||||||||
| 测试 标准仪表系数 | 线性插值法 | 平均系数法 | ||||||||||||||||||||||||||||||
| 点 | / · | -1 | 仪表系数 偏差 | 仪表系数偏差 | ||||||||||||||||||||||||||||
| % | % | |||||||||||||||||||||||||||||||
| P m | ||||||||||||||||||||||||||||||||
| 0.7 | 518.71 | 518.89 | 0.034 | 513.09 | 1.08 | |||||||||||||||||||||||||||
| 1.5 | 514.02 | 514.28 | 0.051 | 513.090.181 | ||||||||||||||||||||||||||||
| 3.0 | 510.94 | 510.99 | 0.010 | 513.090.421 | ||||||||||||||||||||||||||||
| 4.0 | 509.63 | 509.35 | 0.055 | 513.090.679 | ||||||||||||||||||||||||||||
| 5.5 | 508.83 | 508.50 | 0.065 | 513.09 | 0.84 | |||||||||||||||||||||||||||
| 7 | 507.47 | 507.72 | 0.049 | 513.09 | 1.11 | |||||||||||||||||||||||||||
| ( ) | ( ) | ( ) | ||||
| K= | Ki max + Ki min | |||||
| 2 | 12 | |||||
由表2可看出,平均系数法的***大非线性误差为1.11%,而插值修正法的***大误差0.065%,偏差缩小了约17倍。显而易见,在同一测量精准度水平下,采用插值修正法将会明显扩大涡轮传感器的量程范围。
6、结 论:
本文针对涡轮流量计实际应用中存在的问题,基于线性插值方法能有效提高涡轮传感器的测量精度和扩展测量的量程比。电路中芯片均采用低功耗器件,***大程度地降低了系统功耗;同时仪表配有 RS485通信、LCD和按键输入,远程计算机随时可以查看仪表任意时刻的瞬时流量和累积流量等重要的参数,便于操作员能够即时了解和统计流量计的信息。
