

无线水污染超声波明渠水量检测仪|厂家原理
摘 要:超声波明渠流量计是目前在环保行业检测水污染用的***多的一种检测方法。这里提出了一种新的以ARM Cortex-M3为核心,通过利用超声波的波长和时间相关的向量差的算法,可以精准的算出当前水污染的排水速度和高度,同时通过无线GPRS将该数据实时上传到服务器,从而达到对监测点水污染实时检测的目的。通过比较发现,和目前流行的检测仪方法相比,本文提出的方法精准度可以提高50%左右,而成本下降30%,具有极佳的性价比和市场效益。
1、导言:
工业废水是水体主要污染源,它面广、量大、含污染物质多、组成复杂,有的毒性大,处理困难,流量测量一直困扰着工业、市政、水利等领域。尽管许多先进技术在流量测量领域中有较广泛的应用于业绩,但在上述测量方面仍进展不大,也缺乏创新。明渠流量检测作为流量测量的一大分支,随着电子技术、数字技术和声楔材料等技术的发展,利用超声波脉冲测量流体流量的技术发展很快。基于不同原理,适用于不同场合的各种形式的超声波流量计已相继出现,已广泛应用于给排水、污水处理等各个行业。工业和共用事业目前应用较多的明渠流量仪是超声波流量计,其测量方法主要有时差法[ 1 ] 、多普勒效应法[ 2 ] [ 3 ] 、相关法、噪声法[ 5 ] 、波束偏移法等,其中时差法应用***为普遍。超声波流量计的时差测量法是基于超声波在具有流速的媒质里传播时,其传播时间(速率)会随着媒质流速的变化而变化的原理来实现媒质流速测量的方法。
但是利用目前通用的时差法还存在一些问题,其中***突出的问题主要如下:
(1)水的流速和高度的矢量关系无法的算出。
(2)当前的处理器的速度都比较慢,而且没有采取无线信号传输方式来实时检测。
本文提出了一种新的基于32位ARM Cortex-M3内核和uClinux系统的利用超声波波长在不同时间段内多次检测的的向量差,得出水的流速和高度之间的矢量关系,同时将该矢量关系以数组数据方式通过GPRS无线信号实时上传到服务器,从而解决了通用时差法无法解决的两个问题。***后的实时数据分析表明,采用本文提出的向量差方法得到的水的高度和速度之间的矢量关系数据比单用时差法要很多。
2、超声波明渠流量测量原理:
采用波长和时间的向量差的实现原理如上图1所示。假设当水通过流量槽形成自然流动时,其流量Q与流量槽上流水位H的关系为:
Q=K*Hn (2.1)
式中的K,n分别是流量系数和槽结构的喉部尺寸,实际现场依据不同的情况,不同的尺寸赋予不同的值;H为液位的高度(m).超声波传感器在单片机的控制下,进行超声波的发送和接收,由超声波的传播时间T来计算传感器和液面之间的距离:
h(t)=(c*t)/2 (2.2)
式中,c为超声波在空气介质中得传播速度(m/s),若传感
器距流量槽的零液位距离为L,则液位的高度
H(t)=L- h(t) (2.3)
如果我们对上述的数据连续检测,在时间T 内做一个连续时间上的平均,基本就可以得到在一个周期内的液位高度值:
| H | T | T | H (t)dt | 2.4 |
| ³0 | ||||
| 1 |
超声波传感器发射电路中的振荡器产生一定频率的脉冲信号,作为发射的激励信号,当超声波遇到被测液面发射被接收电路接收,由单片机机处理后,算出回波的时间间隔T,由公式 (2.1)、(2.2)、(2.3)和(2.4)***终算出瞬时的流量速度,从而得到水的速度和高度的矢关系。
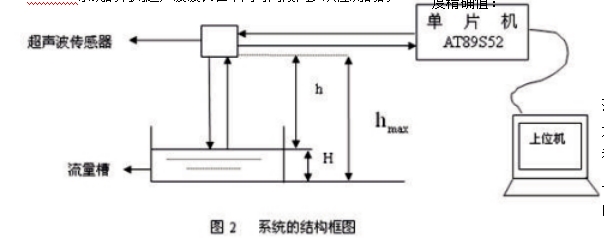

图2 系统的结构框图
3、系统的硬件实现方案:
系统包括超声波发射电路,接收电路,核心功能模块单片机控制器,数据的传输和上位机的显示。利用超声波探头测得高精度的液位信息,再将液位信息与堰槽的类型尺寸相结合,送入ARM处理算出流量,通过串口,传输到上位机,从而完成了污水流量计量体统的设计。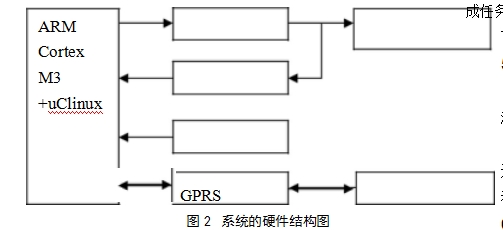
图2 系统的硬件结构图
其中超声波发射电路和接收电路都采用了philip公司的集成芯片TCRT16-40,通过UART接口直接和Cortex M3 CPU连接,在提供2路模拟通道给超声波探头完成模数转换功能,模数转换采取12位高精度的,电流感应电路。通过一定的放大功能完成信号采集和转换。电源电路这里采用了National Semi公司的TD1583 双路DCDC完成高效率,低纹波的电源电平转换,将输入的+5V电源,一路给系统3.3V电压,1.5A电流,然后通过电感完成模拟电源和数字电源隔离,一路给GPRS,4.0V电压和2.5A电流,GPRS模块这里采取了SIMCOM公司的SIM900A模块,集成tcp/ip协议栈,通过5线UART口和ARM Cortex M3 CPU完成数据交互。波特率在115200bps。
4、系统的软件设计:
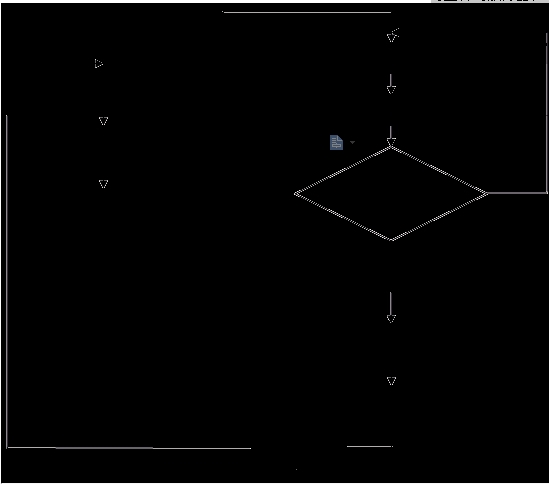
系统的软件设计完成了系统的初始化,模数转换芯片的参数配置,GPRS协议栈初始化以及算法处理、数据保存和无线传输等。整个软件在uClinux系统上完成,由操作系统内部完成任务调度和转换,通过一定的优化完成,整个流程如下图3所示:
5、测试到的数据度分析:
我们将采集到的数据和通用的时差法(传统算法)得到的数据通过对比,得到了如下数据表格:
从上图可以看出,采取我们当前的算法更加逼近实际的数据,这个也表明了采用我们的向量差的算法的测试仪数据更加。
6、总结:
| 表1 | 测试到的数据分析 | |||
| / | ||||
| 1 | 0.7, 12 | 0.65, 11.82 | 0.58, 11.32 | |
| 8 | 0.5, 10.5 | 0.47, 10.33 | 0.42, 9.87 | |
| 24 | 0.6, 10.8 | 0.58, 10.45 | 0.46, 10.39 | |
| 48 | 0.6,10.5 | 0.57, 10.29 | 0.52,9.88 | |
| 1 | 0.5, 11 | 0.47, 10.82 | 0.39, 10.12 | |
本文提出了一种新的以ARM Cortex-M3为核心,通过利用超声波的波长和时间相关的向量差的算法,可以精准的算出当前水污染的排水速度和高度,同时通过无线GPRS将该数据实时上传到服务器,从而达到对监测点水污染实时检测的目的。从实际情况来看,采用该算法和该系统的测试仪,无论是在成本上,还是在性能上,都比目前市场上的测试仪都要好的多,这个也表明了该算法测试仪具有十分广阔的市场应用价值。
