

非接触式明渠流量计产品使用与原理说明
摘 要: 针对超声波流量计测量精度易受温度影响问题, 利用标准杆进行温度补偿, 避免了温度变化对测量精度的影响。 对流量计的硬件电路进行分析和设计, 发射电路利用 555 多谐振荡器, 产生 40 kHz 的超声波, 接收电路对回波信号进行一系列处理, 通过对接收信号进行放大、滤波、检波、比较器反转, 产生中断信号, 软件设计实现回波信号振荡的消除。 实践表明, 该装置具有计量准确、运行可靠、价格低廉特点。
由于超声波其指向性强, 能量消耗缓慢, 传播距离较远,检测手段精度高 , 价格低廉 ,检测迅速方便等特点,超声波在测距和流量等测控系统的研制上得到了广泛的应用。研制的无接触式超声波流量计可应用在经明渠排放的工业污水流量检测。由于接触式测量存在传感器受腐蚀和损坏等问题, 因此非接触式测量技术将具有更大的应用潜力。该仪器具有温度补偿,用标准反射杆做基准进行校正, 可提高该仪器的测量精度。
1、测量原理:
明渠流量计中使用***多是堰式流量计和槽式流量计[ 1] ,通过测出堰槽内堰顶水头高度 h , 采用流量计算公式(1)、(2)可得到流量。汤姆森公式:
| Q =1 .4h2 .5 | (1) |
| h 的适用范围在 0 .05 ~ 0 .18 m ,范围较窄。 | |
| 斯特里克兰公式: | |
| Q =(1 .334 +0 .020 5/ h)h2 .5 | (2) |
h 的适用范围在 0 .06 ~ 0 .381 m 。
超声波测距原理[ 2] :超声波在标准气压下, 超声波在空气中的传播速度为 c , 因此只要测定超声波从发送到接收的传播时间就可以计算出两者之间的距离。
s = ct / 2 (3)超声波在空气中的传播速度为 c ,0 ℃时的传播速度为 331 m/s ,25 ℃时为 347 m/s ,其与环境 θ(℃)的关系如(4)式所示。c = 331 .4 +0 .61θ (4)由于超声波的声速受到温度 、湿度和其它环境因素的影响[ 2],如果测距精度要求很高,则应通过温度补偿的方法加以校正, 为了补偿环境条件影响, 设计了固定参比(标准杆), 以补偿环境条件的影响 。
通过标准杆进行温度 、湿度等补偿后,水位与超声波的速度无关,提高超声波测距精度 。
超声波传感器安装在堰槽上方 ,如图 1 所示, 由单片机激励探头中压电晶体发射超声波信号, 并在发射时刻同时启动单片机内部定时器开始计时 , 该超声波信号在空气中传播 ,遇到标准杆处,其中一部分产生第 1 次反射回波, 而其余部分继续在空气中传播 。反射部分反方向传播, 进入探头 ,引起探头晶片振荡,产生声能—机械能—电能转换 ,使探头输出第 1 个电信号, 引起单片机第 1 次中断。而在空气中继续传播的超声波到达水面时 ,在气液交界面产生第 2 次反射回波 ,反射回波反方向传播反射到压电晶体上 ,使探头输出另一个电信号,引起单片机的第 2 次中断。在中断程序里, 分别读取定时器的计数值 ,即为探头从发射到接收标准杆和水面的反射回波的传播时间 t1 和 t , 根据公式(5)可算出探头到液面的高度 H 。
H = H 1 t/ t1 (5)h = H 2 -H -ha (6)式中 ,h 堰顶水头 ,ha 为堰高 , H 为探头到液面的距离, H2 为探头到堰底的距离。式中 t 为传感器至液面的超声波传播时间, t1 为传感器至标准反射体之间的超声波传播时间, H1 为探头到标准杆的距离 ,H 为探头到液面的距离 。
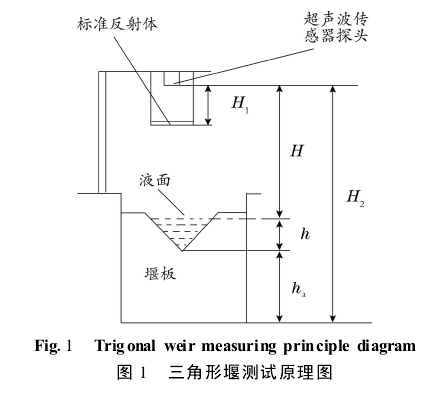

图 1 三角形堰测试原理图
2 、系统硬件的构成:
超声波流量计由超声波发射电路 、接收电路 、电源 、探头等构成,如图 2 所示 。
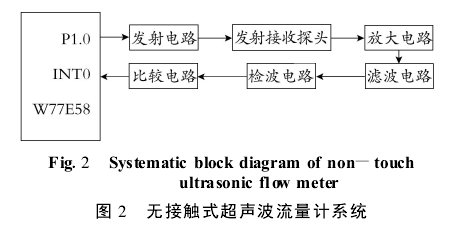
图 2 无接触式超声波流量计系统
W77E58 单片机是 Winbond 公司生产的高速单片机 ,与传统的 8052 系列单片机相比, 其机器周期仅包含 4 个时钟周期 , 执行指令速度是 8052 的1 .5 ~ 3 倍 , 晶体频率可达到 40 M H z , 有 3 个 16 位的定时器/计数器 ,用做定时器时 ,可对 4 个时钟周期计数 ,其定时时钟为 10 M Hz , 测量时间的分辨率为 0 .1 μs 。而 A T89C52 的晶振频率为 24 M Hz ,它的定时频率为 2 MHz , 测量时间分辨率为 0 .5 μs 。因此利用 W77E58 可提高测量时间的精度。它是本系统的核心,控制超声波发送电路发射超声波 ,记录超声波从发射到接收反射回波的时间 , 根据公式(1)和(2)计算出探头到液面的高度。
2 .1、超声波发送电路和接收电路:
2 .1 .1 、超 声波 发送电 路的设计:
由单 片机W77E58 的 P1 .0 管脚产生同步脉冲 , 该同步脉冲作用至由 555 定时器接成的多谐振荡器 , 使振荡电路产生 40 k Hz 的脉冲方波, 经功放加至超声波探头 , 由逆压电效应探头产生频率为 40 k Hz 的超声波[ 3]。
用 555 定时器接成的多谐振荡器来驱动超声波发射传感器 ,如图 3 所示, 555 定时器外接电阻 R1 ,R2 和电容 C1 构成的多谐振荡电路 。 振荡频率 f 主要取决于电阻 R 1(包括电位器的阻值)、R2 和电容C1 , 当 R1 , R2 和 C1 固定时 , 改变电位器的阻值就可调节振荡频率 , 使之与换能器的 40 k Hz 固有频率一致,振荡幅度由电源电压来决定,为保证 555 定时器具有足够的驱动能力 , 采用 +12 V 电源 。
频率为 :f =1 .43/[ (R1 +Rp +2R 2)C1] (7) 但是输出的矩形波是不对称的, 占空比为:q =(R1 +R p +R2 )/(R1 +Rp +2R2 ) (8)。
2 .1 .2 、超声波接收电路的设计:
超声波在空气中传播遇参比面(标准杆)产生第 1 次反射回波 ,在气液交界面处产生第 2 次反射回波, 两次回波分别在压电晶体上 ,产生声能 -机械能 -电能转换,使探头输出电信号,此电信号仅 50 ~ 100 m V , 且伴随一定的噪声[ 4],因此接收电路主要功能是信号的放大, 抑制噪声,提高信噪比[ 5]。在此超声波接收电路前两极放大器[ 6]选用 OPA37 ,后一级选用 AD811 , 前两极之间外接 RC 电路组成高通滤波器, 后两级之间外接选频电路, 有效地抑制噪声。反射的电信号(50~ 100 m V)经接收板接收放大 、倍压及检波后 ,在探头距液面 880 mm 时 , 已达到 17 .3 V ,输出信噪比15 .78 , 比较理想 。
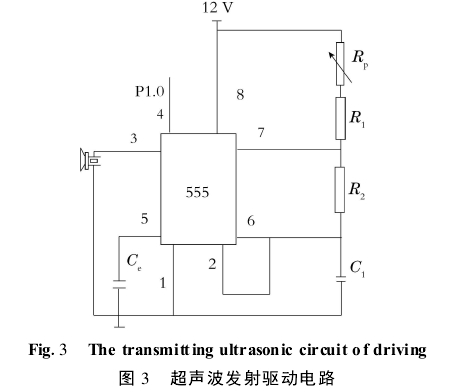
图 3 超声波发射驱动电路
当 P1 .0 由低变高时, 开始发射, 并立即启动定时器 T1 计时 。接收到的两次电信号经接收电路进行三级放大、比较器比较(门坎电压设置是为了去掉噪声电压),开关电路送回单片机作为外中断 IN T0的触发信号 , 引起 CPU 两次中断[ 7]。在中断程序里,分别读取定时器的计数值 ,即为探头从发射到接收标准杆和水面的反射回波的传播时间。在常温下,声音在空气中的传播速度可依据(4)式计算出为340 mm/ ms 。选用 5 个 40 k H z 脉冲方波 120 μs的发射脉冲宽度 。
2 .2、发射回波和标准杆反射回波振荡的消除:
标准杆的反射回波将有 60 μs 的震荡[ 8],对于这些震荡必须消除 ,只用反射回波的第 1 个脉冲 ,采用的方法是单片机发射超声波, 立刻启动定时器计时 ,当计时时间 T <60 μs 时 ,回波信号的通道关闭,关闭中断,当 T >60 μs ,采集回波信号的通道打开,开中断 ,准备接收标准杆的中断 , 进入杆中断后, 读取定时器计数值 , 采集回波信号的通道关闭 , 关中断 ,当 T <60 μs , 采集回波信号的通道打开 , 开中断 ,准备接收水面中断后, 停止定时器计时 ,并读取定时器计数值 t1 。
3、实验结果:
精度问题是我们研制流量计时一直关心的, 系统中单片机的晶振频率为 40 M Hz ,经过四分频后,机器周期为 0 .1 μs 。因此 ,该系统的***小时间分辨率是一个机器周期即 T =0 .1 μs ,所测液位的***小分辨率为 L =TV =0 .074 mm 。表 1 为该流量计[ 9]的实测数据 。
标准流量由电磁流量计给出 ,实验结果证明 :测量误差均小于 1 %。
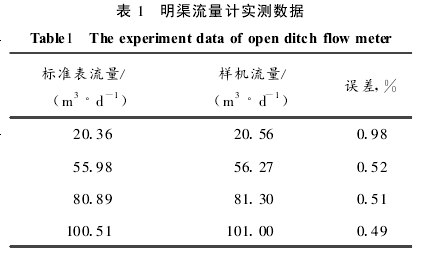
表 1 明渠流量计实测数据
4、结束语:
该流量计在硬件设计上进行温度 、湿度补偿 ,对反射信号进行了滤波, 放大, 与检波处理 , 在软件上对采集数据进行求平均值的处理, 有利于测量精度的提高[ 10]。
