

用涡街流量计和涡轮流量计响应函数控制气液分
摘要:油井产出液的分离计量精度主要是受气液分离程度的影响。 本文提出利用涡街流量计和涡轮流量计的响应函数来控制气液分离, 其控制算法是基于BP 网络的改进的 PID 控制算法, 可以满足油井产出液的计量要求。 经过现场试验, 该控制算法取得很好的效果。
0 、引言从:
油井产出的流体很少是单一的液体或是气态的碳氢化合物, 大多为多相混合流。***简单的组成形式是一种天然气和油水的混合物 。要计量油井的产量和分相含率 , 可采用分离计量的方式 。混合流体经过气液分离后, 利用成熟的单相流测量技术和相分率测量技术计量, 因此计量的不确定度主要受气液分离程度的影响 。基于此问题, 本文提出了利用涡街流量计和涡轮流量计的响应函数混合控制气液分离器 。
1 、工作原理:
涡街流量计是利用流体振动原理来进行流量测量的 。即根据旋涡脱离旋涡发生体的频率与流量之间的关系来测量流量的仪表。而涡轮流量计属于叶轮式速度流量计的一种, 其工作原理是 :置于流体中的叶轮的旋转角速度与流体流速成正比, 通过测量叶轮的旋转角速度就可以得到流体的流速, 从而得到管道内的流量值。涡街流量计在计量气液两相流时,由于流体中含有气泡 ,使旋涡的脱落不稳定 ,也不易形成稳定的涡街 ,当含气率增大到一定程度时 ,将不能形成涡街 。涡轮流量计在测量气液两相流时,由于气相比液相的速度高, 所以测量结果增大 。在气液分离时利用涡街流量计和涡轮流量计的响应函数来控制气液分离器将很好的减小测量的误差 。
但是以往的 PID 控制要取得较好的控制效果, 就必须通过调整好比例、积分和微分三种控制作用 ,形成控制量中既相互配合又相互制约的关系, 这种关系不一定是简单的“线性组合” , 从变化无穷的非线性组合中可以找出***佳的 PID 控制 。神经网络所具有的任意非线性表达能力, 可以通过对系统性能的学习来实现具有***佳组合的 PID 控制 。采用 BP 网络, 可以建立 kp , ki , kd 自学习的PID 控制。所以利用基于 BP 神经网络的改进 PID 控制算法来控制气液分离器 ,可以达到混合流体的计量。
基于 BP(Back Propagation)网络的 PID 控制系统结构如图 1 所示 ,控制器由两部分构成:
1)改进的 PID 控制器 , 直接对被控对象进行闭环控制, 并且三个参数 kp, ki, kd为在线调整方式 ;
2)神经网络 , 根据系统的运行状态 , 调节 PID控制器的参数 ,以期达到分离性能指标的***优化 ,使输出层神经元的输出状态对应于 PID 控制器的三个可调参数 kp, ki, kd通过神经网络的自学习 、加权系数调整 ,使神经网络输出对应于某种***优控制律下的 PID 控制器参数 。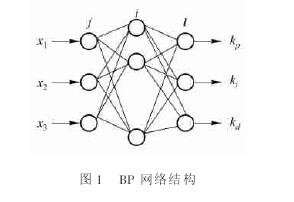

图 1 BP 网络结构
增量式数学 PID 控制算法为u(k )=u(k -1)+kp(error(k)-error(k -1))+kier ror (k )+ kd (er ror (k )-2er ror (k -1)+error (k -2))式中, kp, ki, kd分别为比例 、积分 、微分系数 , error为输入与输出之间的偏差 。
采用三层 BP 网络 , 其结构如图 1 所示 。网络输入层的输入为O(1)j=x(j) j =1 ,2 , …M (2)
式中, 输入变量的个数 M 取决于被控系统的复杂程度 。
网络隐含层的输入、输出分别为
式中 , W(2)ij为隐含层加权系数;上角标(1)、(2)、(3)分别代表输入层 ,隐含层和输出层 。隐层神经元的活化函数取正负对称的函数

网络输出层的输入、输出分别为
输出层输出节点分别对应三个可调参数 kp ,k i , kd。由于 kp, ki, kd不能为负值, 所以输出层神经元的活化函数取非负的 sigmoid 函数
由于 y (k)/ u (k)未知 , 所以近似用符号函数sgn y(k)/ u(k) 取代 , 由此带来计算不的影响可以通过调整学习速率 η来补偿。由式(1)和(5),可求得
基于 BP 网络的改进 PID 控制器结构如图 2 所示, 该控制器的控制算法归纳如下 :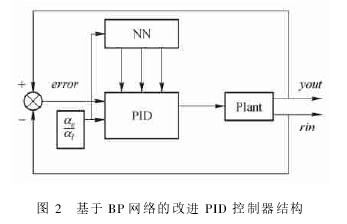
图 2 基于 BP 网络的改进 PID 控制器结构
1)确定 BP 网络的结构 , 即确定输入层节点数M 和隐含层节点数 Q , 并给出各层加权系数的初值W1li(0)和 W2li(0),选定学习速率 η和惯性系数 α,此时 k =1 ;2)采样得到 rin(k)和 yout(k),计算该时刻误差 error(k)=rin(k)-yout(k);3)计算神经网络 NN 各层神经元的输入 、输出, NN 输出层的输出即为 PID 控制器的三个可调参数 kp, ki, kd;4)根据式(1)计算PID 控制器的输出 u(k);5)进行神经网络学习 ,在线调整加权系数 W1ij(k)和 W2li(k),实现 PID 控制参数的自适应调整;6)置 k =k +1 ,返回到 1)。
2 、应用实例:
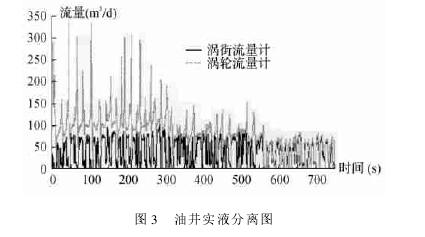
神经网络的结构选 4 -5 -3 , 学习速率 η=0.28 和惯性系数 α=0.04 , 加权系数初始值取区间[ -0.5 ,0.5] 上的随机数 。输入指令信号为采样得到的一路涡街流量计的信号。输出信号取涡轮流量计的信号 。在大庆油田现场测量油井产出液的分离过程如图 3 所示 。
从图 3 中可以看出, 气液分离前涡轮流量计由于混合流体中气体的存在 , 使得响应出现很大的尖峰,尖峰出现的时刻与涡街流量计响应出现谷底的时刻一致。经过气液分离后 , 涡街和涡轮流量计的响应基本相等, 变化趋势一致 。
3 、结论:
1)通过涡街流量计和涡轮流量计的响应函数来控制气液分离 ,可以实时监测调整,达到完全分离的目的;
2)基于 BP 网络的改进 PID 控制算法可以有效的实现对气液分离的实时控制。
3)通过完善算法 ,可以提高气液分离的控制精度;4)现场试验证明 ,此方法达到了计量的要求, 具有良好的应用前景。
