

切向涡轮流量计传感器的结构及原理
切向涡轮流量计是一种速度式流量仪表,它以动量守恒原理为基础。流体冲 击叶轮,使叶轮旋转,叶轮的旋转速度随流量的变化而变化,根据叶轮转速求出 流量值。在工业上,可采用涡轮流量计测量粘度较低的各种液体和气体的流量。 这种流量计具有测量精度高、量程范围宽、线性好、脉冲输出等优点 [12,13] 。
切向涡轮流量计由涡轮流量传感器和接收电脉冲信号的显示仪表组成。 通过 信号检测放大器将叶轮的转速转换成电脉冲,送入二次仪表进行计数和显示,实 现对瞬时流量和累积流量的计量。
1、切向涡轮流量传感器的结构:
不同厂家的切向涡轮流量传感器,其整体结构差异较大,目前国内外主要有 三种,如下图 21 所示。
1.单流束水平流动结构,如图 21(a)所示。 传感器的流体入口和出口在同一轴线上。流体经过一个喷嘴,冲击叶轮上部 的叶片表面,推动叶轮旋转。流体经过另外一个与入口喷嘴在同一轴线上反向安 装的喷嘴流出传感器。
2.单流束环形流动结构,如图 21(b)、(c)所示。 传感器流体入口和出口轴线平行或成一定的角度。流体经过一个喷嘴,冲击 叶轮侧面的叶片表面,推动叶轮旋转;随叶轮旋转,流体在传感器腔内做环形流 动,进一步推动叶轮旋转;在叶轮另一侧,流体经过另外一个与入口喷嘴轴线平 行或成一定角度反向安装的喷嘴或管道,流出传感器。
3.预旋流切向流动结构,如图 21(d)所示。 流体首先经过一个螺杆 1,形成螺旋形流动,再推动叶轮 2 旋转。 在图 21(a)所示单流束水平流动结构的切向涡轮流量传感器主要用于微流量 测量。其结构主要由仪表壳体、涡轮(叶轮) 、喷嘴、轴和轴承以及信号检测放 大器等组成。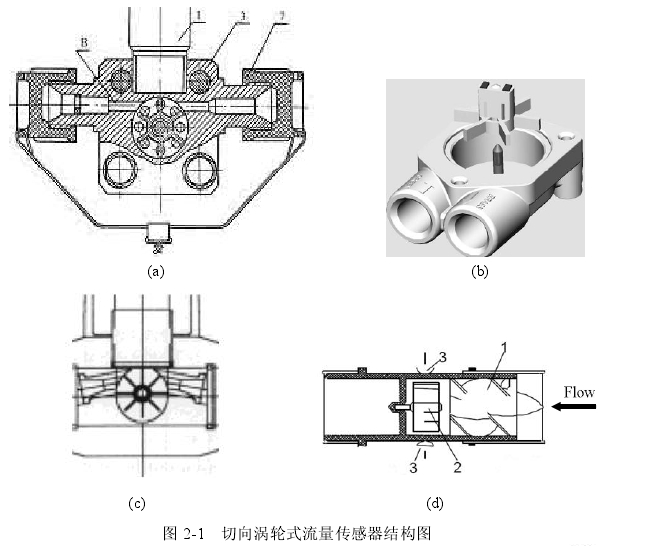

图 2-1 切向涡轮式流量传感器结构图 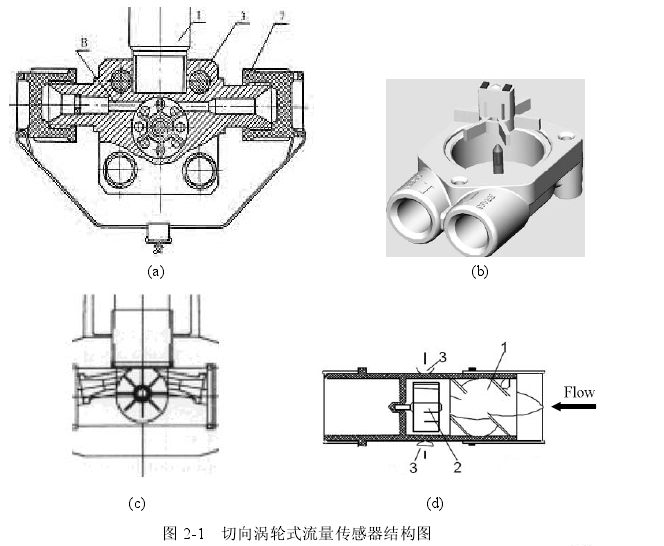
图 2-2 传感器壳体结构图
图 22 为传感器壳体结构图,图中左侧上图为壳体的俯视图,左侧下图为纵 向切面图,右侧图则为壳体的透视图。壳体的各个几何参数图中均有标注。仪表 壳体一般采用不导磁的不锈钢或硬质合金制成, 对于大口径传感器亦可用碳钢与 不锈钢组合的镶嵌结构。 壳体是传感器的主体部件, 它起到承受被测流体的压力, 固定安装检测部件,连接管道的作用,壳体内装有叶轮、轴、轴承,壳体外壁安 装有信号检测放大器。
图 23 是传感器叶轮和轴的结构图,各几何参数均标定在图上。叶轮一般由 高导磁性材料制成, 是传感器的检测部件。 它的作用是把流体动能转换成机械能。 叶轮有直板叶片、螺旋叶片和丁字形叶片等几种,亦可用嵌有许多导磁体的多孔 护罩环来增加一定数量叶片涡轮旋转的频率。叶轮由支架中轴承支承,与壳体同 轴,其叶片数视口径大小而定。叶轮几何形状及尺寸对传感器性能有较大影响, 要根据流体性质、流量范围、使用要求等设计,叶轮的动态平衡很重要,直接影 响仪表的性能和使用寿命。 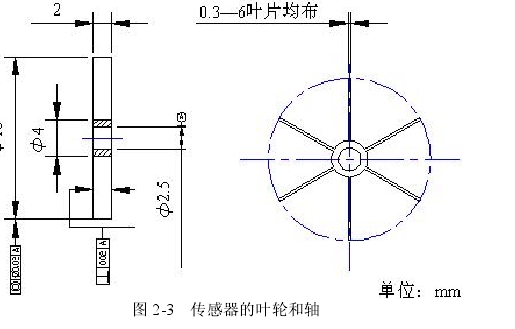
图 2-3 传感器的叶轮和轴
轴与轴承通常选用不锈钢或硬质合金制作,它支承和保证叶轮自由旋转,需 要有足够的刚度、强度和硬度、耐磨性,耐腐性等,它决定着传感器的可靠性和 使用期限。传感器失效通常是由轴与轴承引起的,因此它的结构与材料的选用以 及维护是很重要的。 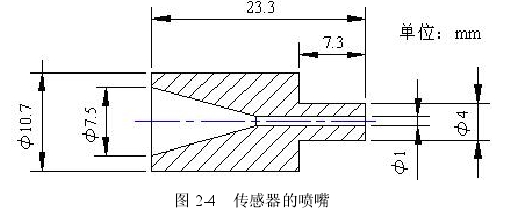
图 2-4 传感器的喷嘴
图 24 为传感器的喷嘴, 由图中可知, 喷嘴入口直径明显大于喷嘴出口直径, 这样可提高液流速度,减小液流与叶片所接触面积。
我国目前一般采用变磁阻式信号检测放大器, 它由磁钢、 导磁棒 (铁芯)、 线圈等组成。它的作用是把涡轮的机械转动信号转换成电脉冲信号输出。信号检 测放大器安装在涡轮叶片的正上方,流体流过时,冲击叶轮旋转。叶片处在 磁钢的正下方时,磁路的磁阻***小;当两个叶片中间的间隙处在磁铁的正下 方时,磁路的磁阻***大。叶轮在流体的冲击下旋转,不断地改变磁路的磁阻,使 磁钢外的线圈中产生变化的感生电势,送入放大整形电路,变成脉冲信号。 脉冲信号的频率与管道中流体的流量成正比 [2] 。
但是变磁阻式信号检测放大器有一个缺点,就是当叶轮转速很低时,转动不 稳定。尤其是小口径涡轮流量计处于下限流量时,就可以观察到叶片转动到 磁钢附近时,会有减速甚至停转现象。这是因 为叶片采用导磁材料制成,磁 钢对叶片具有吸引力,即磁阻力造成的。
为了克服这个缺点,信号检测放大器采用电涡流式代替变磁阻式。利用振荡 器的能量被叶片内的电涡流吸收,调制振荡器振幅的原理,***终输出脉冲信号。
在小流量时,可以消除磁芯吸力对叶轮旋转的影响。
2、切向涡轮流量传感器的工作原理:
当被测流体通过切向涡轮流量传感器时,流体通过喷嘴冲击叶片,流体的冲 击力对涡轮产生转动力矩,使叶轮克服机械摩擦阻力矩和流动阻力矩而转动。实 践表明,在一定的流量范围内,对于一定的流体介质粘度,叶轮的旋转角速度与 通过传感器腔体的流量成正比。所以,可以通过测量叶轮的旋转角速度来侧量流量。
叶轮的旋转角速度通过变频调幅的原理来测量转换的。 将传感器线圈接在电 容三点式振荡器的回路中。无测量物体时,回路谐振频率为 f0 ,输出电压为谐 振电压 U0 。当被测物靠近传感器线圈时,线圈的等效电感发生变化,从而引起 振荡器的谐振频率发生变化, 此时由传感器回路组成的振荡电路输出电压波形不 但频率发生了变化,而且幅值也发生了变化。信号经过检波电路、滤波电路,从 调制波中检出叶轮转动频率信号,再经过信号放大电路、电压比较器、射极跟随 器得到和叶片旋转频率相同的脉冲信号,送至二次显示仪表进行累计和显示。输 出电脉冲与叶轮转速成正比,叶轮转速与流量正相关,所以输出电脉冲频率与流过传感器的流量正相关。 切向涡轮流量传感器的电脉冲信号的频率 f(次/秒)与流过管道的体积流量 v q (m 3 /s)正相关时,其比例系数即为传感器的仪表系数 K(1/m 3 ),如式(21) 所示: 
在同一时间内,传感器的脉冲数 N 与流过管道的液体体积 V(m 3 )也成正 相关,其比例系统也为传感器的仪表系数 K(1/m 3 ),如式(23)所示: 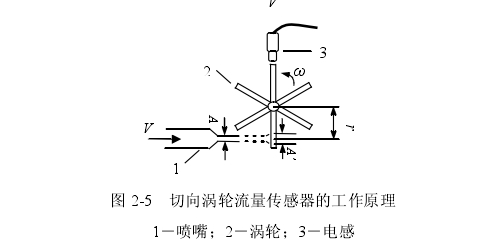
图 2-5 切向涡轮流量传感器的工作原理 1-喷嘴;2-涡轮;3-电感
3、切向涡轮流量传感器的仪表系数 K :
涡轮传感器的运动微分方程为 re rf rm r T T T T d J – – – = wdt (28) 式中: J —— 涡轮的转动惯量; ω —— 涡轮的旋转角速度; Tr —— 流体对涡轮叶片的驱动力矩; Trm —— 涡轮轴与轴承之间的机械摩擦阻力矩; Trf —— 流体对涡轮的粘性摩擦阻力矩; Tre —— 电磁检测器对涡轮的电磁阻力矩。
由式(210)可知,叶轮转速与流量成线性关系。设计的流量计即根据此原 理,叶轮转速经齿轮传动降速后,由计数器累加并显示,以表示累积流量。其示 值与流量成正比。
设计数器示值为 f,齿轮传动比为 i,叶轮转速为 n,则 f 与ω的关系为 π 2 i ni fw = =
4、切向涡轮流量传感器的特性分析:
切向涡轮流量传感器的线性特性曲线用体积流量 v q 与仪表系数 K 所表示。 理想状态下,K v q 特性曲线应该是一条水平的直线。但是,实际中由于流体流 动特性、叶轮的惯性和转动部分摩擦力的影响,实际的特性曲线并不是一条水平 直线。如图 26 所示。
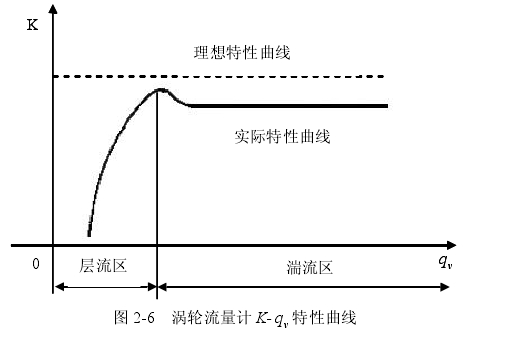
图 2-6 涡轮流量计 K v q 特性曲线
由图可见,仪表系数可分为二段,即线性段和非线性段 [2] 。线性段约为其工 作段的三分之二,其特性与传感器结构尺寸及流体粘度有关。在非线性段,特性 受轴承摩擦力,流体粘性阻力影响较大。当流量低于传感器下限时,仪表系数随 着流量降低而迅速减小。当流量超过流量上限时要注意防止空穴现象。传感器的 仪表系数由流量标定装置检定得出, 它完全不需要知道传感器内部流量的流动机 理,而把传感器作为一个黑匣子,根据输入流量和输出脉冲信号的频率确定其转 换系数,便于实际应用。但此仪表系数是有条件的,其检验条件是参考条件,如 果使用时偏离此参考条件,系数将发生变化,变化的条件将视传感器的类型,管 道的安装条件和流体的物性参数等情况而定。
因此,在设计涡轮流量计时,必须在其线性范围内测量,才能保证测量的准 确度。这里所说的线性范围,一般指仪表系数的变化值在±1%的范围内所对应的 流量范围。
2.频率特性:
涡轮流量传感器的频率特性曲线用输出信号频率 f 和体积流量 v q 表示。 实际 的 v f q – 曲线如图 27 所示。 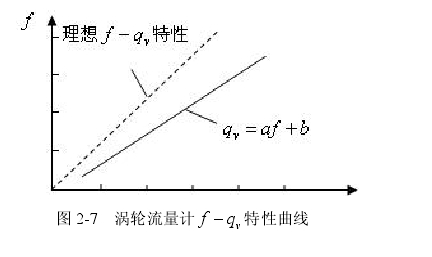
图 2-7 涡轮流量计 v f q – 特性曲线
理想的 v f q – 曲线应是通过坐标原点的一条直线。在实际的流量测量,仪表 系数 K 随流量大小的变化而有所变化,所以 v q f – 曲线偏离了理想曲线。
