

磁轴承涡轮流量计传感器结构原理说明
摘要:对不同结构的磁轴承涡轮流量传感器进行了比较综合 ,发现采用被动磁轴承结合机械约束 ,实现传感器内部可动部件叶轮的部分悬浮 ,是减小轴与轴承之间机械摩擦阻力、降低轴和轴承的磨损 ,从而提高传感器的灵敏度 ,增加传感器使用寿命的一条思路。提出了采用两个轴向磁化的径向磁轴承结合两个球头轴尖支撑的涡轮流量传感器结构 ,并进行了理论分析和参数计算。 对研制磁轴承涡轮流量传感器过程中遇到的问题 ,进行了初步探讨。
1、引言:涡轮流量传感器具有精度高、体积小、结构简单、输出脉冲信号等优点 ,已在多个领域得到广泛应用。 由于轴承的磨损和轴承摩擦阻力的增大 ,将增大测量误差 ,所以涡轮流量传感器难以长期保持校准特性 ,需定期校验 ,轴承大约一年应更换一次[1~ 4]。 对于无润滑性液体 ,或液体中含有悬浮物,可能造成轴承磨损及卡住等问题 ,限制了其使用范围[1~ 4]。小口径 ( DN 0. 05m以下 )涡轮流量传感器的范围度为 6∶ 1或 5∶ 1,需要提高[4]。
涡轮流量传感器的长期稳定性和可靠性 ,在一定程度上取决于轴和轴承在工作条件下的磨损情况和配合间隙 ,这是目前需要解决的一大问题 [2]。流量测量线性范围的下限值 ,主要取决于轴承的摩擦阻力 [2]。轴承的摩擦阻力越大 ,下限流量值就越大 ,测量线性范围就越小 [2]。实验证明 ,轴承负载的变化会造成仪表系数的波动 ,从而造成千分之一到千分之几的测量误差 ,在小流量时 ,其影响更为显著[ 2]。
前 ,在测量液体的涡轮流量传感器中广泛使用硬质合金滑动轴承[ 1 ],在测量气体的涡轮流量传感器中一般使用滚动轴承 ,并对轴承系统注入润滑剂 [4]。 滑动轴承的摩擦阻力较大 ,对传感器的始动流量、特性曲线非线性区的曲线形状、线性区的宽度有很大影响 , 尤其是对小口径涡轮流量传感器。 轴承的磨损限制了传感器的使用寿命和准确度 ,高准确度使用时 ,普遍要求每半年对传感器进行一次检定。为了减小轴的磨损 ,要求叶轮转速不很高 ,这限制了传感器分辨率的提高。
采用完全或部分没有机械摩擦的磁轴承 ,是减小机械摩擦阻力影响的一个途径。 文中对不同结构的磁轴承涡轮流量传感器进行了比较和综合 ,提出了采用两个轴向磁化的径向磁轴承结合两个球头轴尖支撑的涡轮流量传感器结构 , 并进行了理论分析和参数计算。
2、磁轴承的基本原理:
磁轴承具有无接触、无摩擦、无磨损、高速度、高精度、不需要润滑和密封等优点 ,改变了传统的支撑形式 [5~ 7]。 磁轴承可分为采用电磁力结合主动控制的主动磁轴承和仅由永磁铁构成的被动磁轴承。 与主动磁轴承相比 ,被动磁轴承还具有结构简单、价格低廉、承载力高、零响应时间等突出优点 [5]。
主动磁轴承的结构如图 1所示[ 8]。 缺点主要是必须外加控制装置 ,结构复杂 ,成本高。 被动径向磁轴承结构如图 2所示 [9]。 根据 Earnshaw 理论 ,仅用永磁材料构成的磁轴承 ,至少在一个自由度上是不稳定的。图2所示的径向磁轴承 ,在轴向上是不稳定的 ,需要增加适当的约束 ,以实现稳定支撑。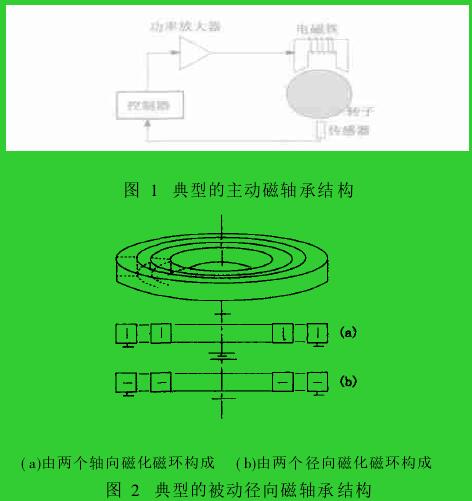

图 1 典型的主动磁轴承结构图 2 典型的被动径向磁轴承结构
3、磁轴承涡轮流量传感器的结构:
3. 1、超导与电磁相结合的磁轴承涡轮流量传感器: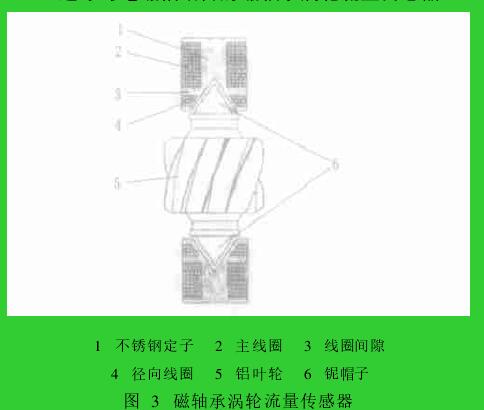
图 3 磁轴承涡轮流量传感器
A. Riv et ti[10]研制的磁轴承涡轮流量传感器结构如图 3所示。特点: 竖直安装 ,流体自下而上流动; 依靠超导线圈和超导材料铌制成的锥形帽子之间的作用力实现悬浮; 由电源模块为线圈供电。 主要问题: 竖直安装会降低其流量测量的范围度 ; 超导线圈对使用环境的特殊要求 ,限制了其使用范围; 超导线圈、超导材料铌较为昂贵 ,造价很高; 必须由电源模块为线圈供电 ,使其运行成本较高。
3. 2、永磁和电磁同时使用的磁轴承涡轮流量传感器: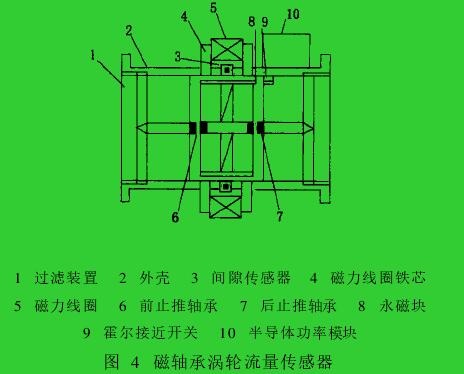
图 4 磁轴承涡轮流量传感器
张茂青[ 11 ]研制的磁轴承涡轮流量传感器样机结构如图 4所示。特点: 叶片周边的环形磁铁与壳体外的电磁线圈构成径向主动磁轴承 ; 根据间隙传感器的输出信号调整线圈电流 ,控制轴承稳定运行; 线圈由半导体功率模块驱动 ;在轴两端与整流器两端装有轴向被动磁轴承。 主要问题: 由间隙传感器、电磁线圈和控制器构成的伺服控制系统结构非常复杂 ,不仅对研制和生产提出很高要求 ,而且造价也很高; 必须由半导体功率模块为线圈供电 ,运行成本较高。
3. 3、仅使用永磁体的磁轴承涡轮流量传感器: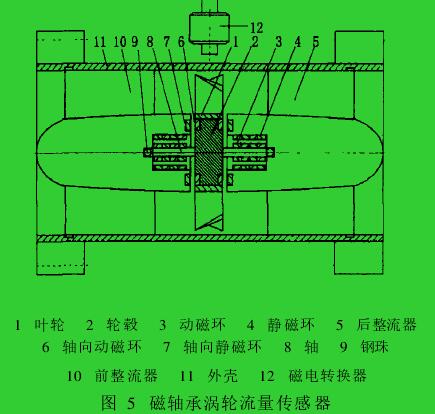
图 5 磁轴承涡轮流量传感器
查美生[ 12 ]提出的磁轴承涡轮流量传感器结构如图 5所示。特点: 在叶轮轴两端各有一个由 4对径向磁化的永磁环构成的径向磁轴承; 径向磁轴承的动、静磁环 ,以斥力形式工作 ,相邻的两对永磁环也彼此相斥;在整流器的端面上和叶轮轮毂的端面上装有彼此相斥的磁环 ,构成轴向被动磁轴承; 在叶轮轴的尾端装有两个钢珠 ,使得叶轮在轴向上可以有小量窜动。 主要问题: 制造径向磁化磁环难度非常大 ,目前 ,常用多片扇形磁体拼成环状 ,装配工艺较为复杂; 扇形磁体的磁化很难做到均匀 ,扇形磁体的拼装精度对磁场也有很大影响 ,所以磁环四周的磁场很难做到均匀。
图 6 磁轴承涡轮流量传感器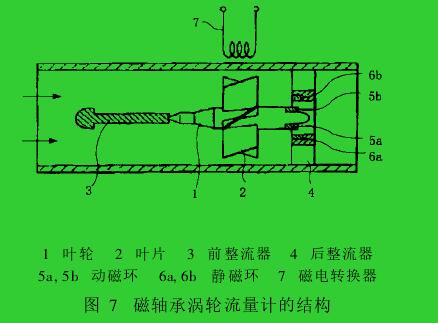
图 7 磁轴承涡轮流量计的结构
马腾[ 13 ]提出的磁轴承涡轮流量传感器结构如图 6所示。特点: 采用环形涡轮体 ,叶片安装在环的内侧; 由环形涡轮磁体和环形磁扼磁体构成被动磁轴承 ; 环形涡轮磁体和环形磁扼磁体均为轴向磁化 ,以斥力形式工作。 主要问题: 具有锥形工作表面的永磁体 ,加工工艺和磁化均有困难; 仅用永磁体 ,靠斜面之间的斥力工作 ,实现稳定完全悬浮的可能性很小; 环形涡轮体的设计参数 ,需要严格的理论计算和大量的实验验证才可能得到优化。
Ch ang[ 14]提出的磁轴承涡轮流量传感器结构如图7 所示。 特点: 叶轮与前整流器一点接触 ; 动磁环和静磁环在轴向上是不对齐的。主要问题: 在流量突然增大时 ,叶轮有可能从前整流器上脱落; 静磁环的安装位置不利于叶轮后面的整流; 叶轮的结构使轮毂较为粗大 ,增加了叶轮的转动惯量和流体的粘性阻力 ,对降低流量测量下限和提高灵敏度都不利。
4、轴尖支撑的磁轴承涡轮流量传感器:
4. 1、轴尖支撑的磁轴承涡轮流量传感器结构:
采用超导材料将限制传感器的使用范围 ,电磁力结合伺服控制的难度和造价又非常高 ,采用被动磁轴承结合机械约束实现涡轮的部分悬浮 ,就成为一个可选的方案。结合上述不同结构 ,提出了采用两个轴向磁化的径向磁轴承结合两个球头轴尖支撑的磁轴承涡轮流量传感器结构 ,如图 8所示。
由于制造轴向磁化永磁环的技术非常成熟 ,所以 ,采用轴向磁化的永磁环来构建被动径向磁轴承。另外 ,涡轮流量传感器叶轮很轻 ,叶轮轴的载荷不很大 ,磁轴承可仅由一对永磁环构成 ,如图 9所示。理论和实验证明 ,被动径向磁轴承在轴向上是不稳定的 ,动磁环不仅会产生轴向位移 ,而且会发生轴向翻转 ,如图 10所示。所以 ,在轴的两端采用球头轴尖支撑 ,如图 11所示。接触面为小球面 ,并非很小的一点。球头轴尖支撑可以约束轴的轴向位移 ,在一定程度上又能克服其轴向翻转。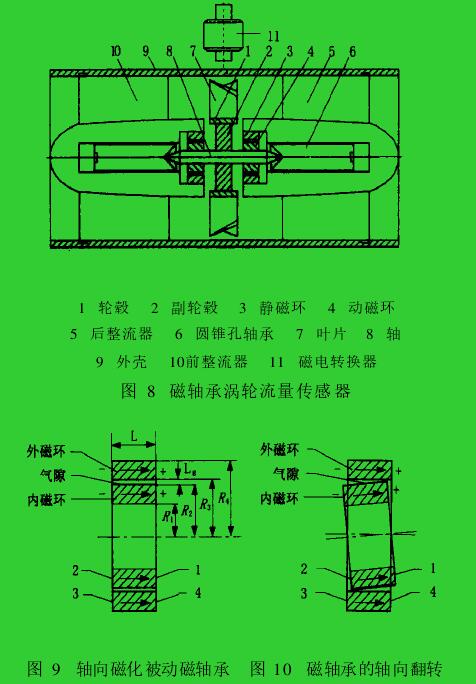
图 8 磁轴承涡轮流量传感器图 9 轴向磁化被动磁轴承 图 10 磁轴承的轴向翻转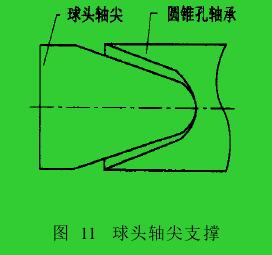
图 11 球头轴尖支撑
4. 2、被动磁轴承的特性计算:
修世超[ 15 ]建立了轴向磁化径向磁轴承的数值积分模型 ,如图 12所示。 承载能力 Fr的数学模型为[ 15]Fr = F23+ F14- F13- F24=Br 1· Br 24π_0( S23+ S14 – S13 – S24 )( 1)式中: F23—— 外磁环的端面 3与内磁环的端面 2之间作用力在径向上的分量; F13—— 外磁环的端面 3与内磁环的端面 1之间作用力在径向上的分量; F24—— 外磁环的端面 4与内磁环的端面 2之间作用力在径向上的分量; F14—— 外磁环的端面 4与内磁环的端面 1之间作用力在径向上的分量; _0—— 真空磁导率; Br1, Br2—— 内、外永磁环的剩余磁感应强度。S23= ∫R2R1∫R4R3∫2c0∫2c0r2· r3( r3co s U- r2cos T- e ) dr2dr3 d Td U[x20+ ( r3co s U- r2cos T- e ) 2+ (r3sin U- r2sin T)2 ]3 /2S13= ∫R2R1∫R4R3∫2c0∫2c0r1· r3(r3 co s U- r1co s T- e ) dr1dr3d Td U[( L+ x 0 )2+ ( r3 cos U- r1cos T- e )2+ ( r3 sin U- r1sin T)2]3 / 2S14= ∫R2R1∫R4R3∫2c0∫2c0r1· r4( r4co s U- r1cos T- e ) dr1dr4 d Td U[x20+ ( r4co s U- r1cos T- e ) 2+ (r4sin U- r1sin T)2 ]3 /2S24= ∫R2R1∫R4R3∫2c0∫2c0r2· r4(r4 co s U- r2co s T- e ) dr2dr4d Td U[( L – x 0 )2+ ( r4 cos U- r2cos T- e )2+ ( r4sin U- r2sin T) 2 ]3 /2式中: r1,T—— 端面 1上任意一点的极坐标 ;r2 ,T—— 端面 2上任意一点的极坐标 ;r3 ,U—— 端面 3上任意一点的极坐标 ;r4 ,U—— 端面 4上任意一点的极坐标 ;e—— 内环相对外环沿径向的位移 ;x0—— 内环相对外环的轴向位移。根据文献中的建模方法[ 15],可建立轴向作用力 Fz的数学模型为:FZ = F′23+ F′14- F′13- F′24=Br 1· Br 24π_0( S′23+ S′14- S′13- S′24)( 2)式中:S′23= ∫R2R1∫R4R3∫2c0∫2c0r2· r3· x0dr2dr3 d Td U[x20+ ( r3co s U- r2cos T- e )2+ (r3 sin U- r2sin T)2]3 / 2S′13= ∫R2R1∫R4R3∫2c0∫2c0r1· r3( L+ x 0 ) dr1dr3 d Td U[( L+ x 0 )2+ ( r3 cos U- r1cos T- e )2+ ( r3sin U- r1sin T) 2 ]3 /2S′14= ∫R2R1∫R4R3∫2c0∫2c0r1· r4· x0dr1dr4 d Td US′24= ∫R2R1∫R4R3∫2c0∫2c0r2· r4( L – x 0 ) dr2dr4 d Td U[( L – x 0 )2+ ( r4co s U- r2cos T- e )2+ (r4 sin U- r2sin T)2]3/ 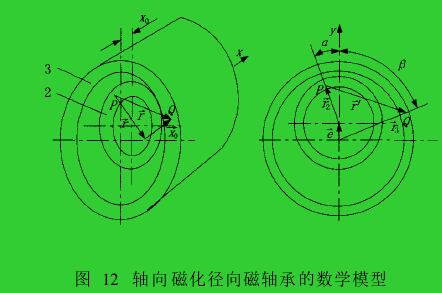
图 12 轴向磁化径向磁轴承的数学模型
以 DN0. 05m涡轮流量传感器为例研制了样机。 磁轴承采用 Nd Fe B材料 , R1、R2、 R3和 R4分别为 0. 004m、0. 006m、 0. 0063m 和 0. 0083m , L 为 0. 004m , Br1、 Br2均为 1. 2T。 按照高斯法求解多重积分[ 16~ 18],对数学模型编制了计算程序。在内、外磁环轴向对齐时 ,径向力 Fr、径向刚度K r随内磁环径向位移e的变化如表 1所示。 在内、外磁环处于同轴状态时,轴向力 Fz、轴向刚度 Kz随内磁环轴向位移 x0的变化如表 2所示。
表 1 径向力随内磁环 表 2 轴向力随内磁环轴径向位移的变化 向位移的变化
由表中数据看出 ,仅一个径向磁轴承 ,在径向位移为 0. 05mm时 ,所产生的径向力就足以将 0. 02kg的叶轮托起 ;在一定范围内 ,轴向力随着轴向位移的增大而增大 ,所以 ,必须尽可能减小轴向位移。
5、讨论:
实现磁轴承涡轮流量传感器的可靠运行 ,仍有许多问题需要解决 ,在此对传感器整体结构和永磁材料使用方面的问题作初步探讨。
5. 1、传感器整体结构:
构成磁轴承的永磁环 ,会吸附被测流体中的铁磁性微粒 ,这将造成磁轴承工作状态的改变。 所以 ,在传感器的前端必须安装磁过滤器。另外 ,可以采用磁屏蔽技术设计磁轴承 ,以减少磁场与流体的接触。
采用磁轴承后 ,整流器和叶轮的参数可以作适当改进。 一方面 ,除轴承部分外 ,应***大限度的维持原有的基本已经优化的参数。另一方面 ,在确实能够进一步提高传感器性能的方向上 ,对整流器和叶轮进行改进。 磁轴承对叶轮的支撑为弹性支撑 ,即使在被测流量稳定的情况下 ,叶轮也会产生一定程度的抖动 ,这可能会影响传感器的测量精度或线性范围。所以 ,必须优化系统结构参数。从转子动力学角度考虑 ,优化的主要参数为转子质量M和磁轴承的径向刚度Kr。流体对叶轮的轴向推力 ,将增大球头轴尖和圆锥孔轴承之间的机械摩擦阻力 ,并加速其磨损。可以采用“反推式”涡轮结构 ,减小球头轴尖和圆锥孔轴承之间的轴向力。径向磁轴承在轴向上是不稳定的 ,内、外磁环在轴向上的相对位移 ,决定了轴向力的大小。所以 ,保证内、外磁环在轴向上的严格对齐 ,非常重要。由于存在机械加工误差 ,内、外磁环在轴向上的相对位移不可能为零。 设置一个调节机构 ,使内、外磁环之间的相对位移达到***小 ,是必要的。
5. 2、永磁材料的使用:
由于磁轴承需要长期浸泡在被测介质中 ,所以 ,必须解决永磁材料的防腐问题。 例如 , N d Fe B 材料不能长期浸泡在水中,常采用给磁体增加保护膜的办法进行解决。
不同厂家或同一厂家不同批次的磁性元件之间 ,磁性能存在差异。 有必要通过高斯计等专用设备测定磁性元件的性能 ,尽可能保证一个传感器中使用的元件具有相近的磁性。
永磁材料的磁性受环境温度影响较大 ,须解决磁路工作点随着温度变化而变化的问题。 所以要确定对所使用的永磁材料的磁性受温度影响的程度 ,以在设计过程中作适当的修正 ,留出足够的裕量。 另外 ,在磁材料投入使用之前 ,可进行温度处理 ,以使其具有更好的温度适应能力。
永磁材料的特性容易受到高温、振动、机械冲击和铁磁性物质的影响。在机械装配过程中 ,环境温度不应超过磁材料正常工作时的温度 ,避免使用由铁磁性材料制作的工具 ,避免对磁材料的敲击或机械冲击。
6、结论:
经过对不同结构的磁轴承涡轮流量传感器进行比较和综合 ,发现采用被动磁轴承结合机械约束 ,实现传感器内部可动部件叶轮的部分悬浮 ,是减小轴与轴承之间机械摩擦阻力、降低轴和轴承的磨损 ,从而提高传感器的灵敏度 ,增加传感器使用寿命的一条思路。采用两个轴向磁化的径向磁轴承结合两个球头轴尖支撑的涡轮流量传感器结构 ,在理论上具有一定的合理性 ,但其可行性仍需试验验证。
