

高精度毫米波雷达液位计 测距算法都有哪些
摘要:本文基于毫米波FMCW雷达液位计测距原理,针对影响测距精度的FFT栅栏效应问题,提出了将Zoom FFT和能量重心校正算法结合的高精度信号处理算法.该算法通过FFT算法锁定感兴趣的差频信号频谱范围,采用Zoom FFT在此范围内进行频谱细化,后利用能量重心校正算法对细化后的频谱进行频率校正,从而获得差频信号的频率信息,并通过换算得到雷达到液面的距离.仿真结果表明,该算法能将雷达液位计的测距精度提高到毫米量级,计算量和运算存储空间比较合理.
随着工业自动化水平的提高,雷达液位计在石油、冶金、化工等领域得到了广泛应用[1].在工业生产过程中,液位计很小的测量误差都会引起巨大的经济损失,提高液位计的测量精度成为迫切需要. FMCW雷达具有测距精度高、无距离盲区、发射功率小等优点,很适合高精度近距离测距[2].工作于毫米波段的雷达液位计的调频带宽较大,距离分辨率高,且在有限的天线尺寸下有更窄的波束,油罐壁等杂物反射的干扰电磁波更不易被天线接收,这都有利于提高液位的测量准确度,因此,毫米波FMCW雷达液位计是实现高精度液位测量的理想装置.
FMCW雷达液位计的距离信息是通过测量差频信号的频率获得的,要提高测距精度必须提高差频信号的频率测量精度.现代液位计信号处理一般采用数字信号处理形式,由于对差频信号做快速傅里叶变换(FFT)得到的频谱是离散的,离散谱的栅栏效应会严重影响频率测量精度.为此,可以采用频谱校正方法来消除栅栏效应,常用的频谱校正方法有FFT—FT连续细化[3]、比值校正[4]、能量重心校正[5-7]、 相位差法[8,9]等.Zoom FFT方法[10]是频谱细化方法的一种[11],与其他频谱细化方法相比,其计算量和存储空间较小,但是算法中的低通滤波器性能会限制其细化倍数.鉴于此,本文利用Zoom FFT进行较小倍数的细化,然后采用能量重心校正算法来估计的频率,从而提高测距精度.
1、FMCW雷达液位计测距原理:
FMCW雷达液位计向液面发射频率经过调制的电磁波,液面反射的回波信号被雷达接收,与发射信号进行混频,由此产生的差频信号的频率与液面距离成正比.线性调制的FMCW雷达发射信号与接收信号的频率随时间变化关系如图1所示.
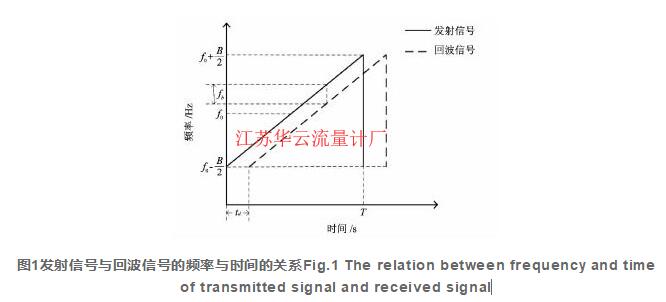

图1发射信号与回波信号的频率与时间的关系Fig.1 The relation between frequency and time of transmitted signal and received signal
在一个调制周期内发射信号可以表示为

式中:VT为发射信号的幅度;T为调制周期;f0为发射信号中心频率;B为发射信号扫频带宽;φ0为发射信号初始相位.
回波信号经过td=2R/c双程时延后被雷达接收,与发射信号混频输出的差频信号进行化简和幅度归一化后可表示为

发射信号与回波信号混频后得到的差频信号频率为

式中:fT(t)表示发射信号的频率;fR(t)表示接收信号的频率.可见,差频信号的频率与液面距离成正比.由于液面对电磁波的反射可近似为镜面反射,差频信号在理想状态下是单频信号,为提高测距精度, 需采用信号处理算法对差频信号的频率进行测量.
2、差频信号处理算法分析:
2.1、栅栏效应对测距精度的影响:
雷达液位计采用数字信号处理方式,对差频信号进行采样后进行FFT处理,得到差频信号的频谱, ***简单的测量方法是通过直接寻找谱峰测得差频信号的频率.实际应用中,FFT的栅栏效应会影响频率检测的准确度.假设对差频采样信号做Nf点的FFT,栅栏效应产生的频谱谱线间隔为 Δf=Fs/Nf,其中Fs为采样频率.若Nf与差频信号的采样点数N相同,则 Δf=Fs/N=1/T,将其代入式(1)~式(3) 可得栅栏效应导致的距离测量离散化,相应的距离离散单元可表示为

本文采用的77GHz雷达调频带宽B=400 MHz,如果只采用FFT算法进行信号处理,则栅栏效应导致的测距误差***大可为±187.5mm,这远远满足不了液位计的测距精度要求.
为解决栅栏效应问题,可以对每个周期的采样信号补零,使Nf=aN,a>1,则对应的距离分辨单元可降低为 ΔR=c/2aB.虽然补零方法可以提高测距精度,但因为FFT的点数增大,导致计算量和运算存储空间大幅度增加,降低了运算实时性,且对硬件要求高.为此,本文采用Zoom FFT方法对差频信号频谱进行局部细化,能在计算量和运算存储空间消耗较小的情况下达到和补零FFT同样的效果.
2.2 、Zoom FFT原理:
Zoom FFT是一种可以进行频谱局部细化的方法[12],即在感兴趣的频谱范围内减小频谱谱线间隔, 提高频谱分析的准确度.其基本原理如图2所示.
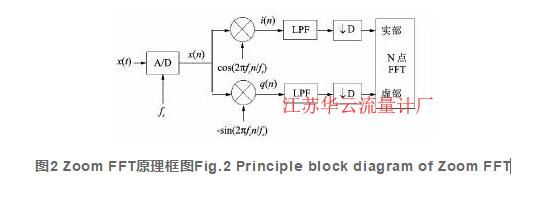
图2 Zoom FFT原理框图Fig.2 Principle block diagram of Zoom FFT
Zoom FFT步骤如下:
1)频谱搬移.通过复调制将感兴趣范围内的频谱搬移到零频附近.
2)低通滤波.将不关心的高频分量滤掉, 因为在下一步中要对信号进行系数为D的抽取,使等效采样速率降低为fs/D,又根据奈奎斯特采样定律,所以须将大于fs/2D分量全部滤除,以防止频谱混叠.
3)抽取.对信号进行系数为D的抽取,即在时域上每隔D个采样点保留一个,其余的点舍弃.抽取后的等效采样速率为fs/D.
4)对信号做N点FFT.由于此时信号的等效采样频率为fs/D,所以经过Zoom FFT处理后,选定频谱范围内的谱线间隔为 ,式中 Δf为直接对信号x(n)做N点FFT时的谱线间隔.
,式中 Δf为直接对信号x(n)做N点FFT时的谱线间隔.
可见,细化倍数为D的Zoom FFT算法在选定的局部频谱范围内的细化效果与做DN点的补零FFT效果是相同的,但是计算量与运算存储空间差别明显.DN点的补零FFT所需0.5DNlog2(DN)次复乘.细化倍数为D的Zoom FFT总共需要2 N+1.5 Nlog2N次复乘(低通滤波采用频域相乘IFFT方式).在运算所需存储空间方面,DN点的补零FFT需要预先存储0.5DN个复数旋转因子.Zoom FFT只需要存储0.5 N个复数旋转因子,此外还需要提前存储FIR滤波器冲击响应频域特性H(k),所以总共需要存储1.5 N个复数.设采样信号点数N=1 024,细化倍数D=16,则补零FFT与Zoom FFT算法所需的复乘次数与预先存储的复数量如表1所示,可见Zoom FFT算法的计算量与运算存储空间远小于DN点的补零FFT.
表1补零FFT与Zoom FFT计算量与存储空间比较Tab.1 Computational load and memory space consumption of zero padding FFT and Zoom FFT

Zoom FFT算法的细化倍数D是不能无限增大的,这是由于其算法的第2步要对频谱搬移后的信号进行低通滤波,而实际设计的滤波器的截止特性肯定不是理想的,这会引起第3步抽取之后的频谱混叠. 细化倍数越大,滤波器设计的难度越大,其截止特性越不理想,因此一般要将细化倍数D控制在100以下.有限的细化倍数会导致测距精度下降,因此本文在Zoom FFT算法细化较小的倍数之后采用能量重心校正算法进一步提高测距精度.
2.3、能量重心校正算法:
能量重心校正算法[5]是基于对称窗函数的离散谱能量重心无穷接近原点的性质,如常用对称窗函数矩形窗、Hanning窗、Hamming窗、Blackman窗的能量重心都在原点附近.设加窗后的信号的离散频谱为X(k),则其功率谱为P(k)=|X(k)|2,由对称窗的能量重心特性可得

式中:km为功率谱值***大时对应的谱线号;k0为信号的实际频率所对应的位置.由此可求得

可得校正频率f0=k0fs/N,其中fs为采样率,N为采样点数.在校正单频成分时,理论上n的值越大,校正精度越高,但在实际应用中,n不可能取无穷大,只能取有限值.
3、高精度测距信号处理算法:
本文将Zoom FFT算法和能量重心校正方法结合,设计的高精度测距信号处理算法步骤为:
1)对以速率fs采样得到的差频信号x(n)做N点FFT得到X(k),找到功率谱P(k)=|X(k)|2***大值对应的谱线位置km1.
2)采用Zoom FFT对km1附近的频谱进行局部频谱细化得到Xz(k).其中Zoom FFT第1步将频谱向零频位置搬移km1-s个谱线位置,第3步的细化倍数D=16.
3)找到细化后的功率谱Pz(k)=|Xz(k)|2***大值对应的位置km2,进行能量校正运算,其中参数n取30,求得ke
4)计算液面距离R

4、仿真结果:
本文在Matlab环境下进行仿真实验,仿真中发射信号中心频率f0=77 GHz,调频带宽B=400 MHz,调制周期T=512μs,采样频率fs=2MHz,采样点数N=1 024,测距范围R为3~30m,信噪比设置为12dB.对测距范围内的距离对应的差频信号进行分析,分别得到不同距离对应的测距均方根误差.图3所示为采用本文测距算法与只采用Zoom FFT测距算法时,在15m附近实际距离对应的测距均方根误差,其中Zoom FFT算法的细化倍数D=16.
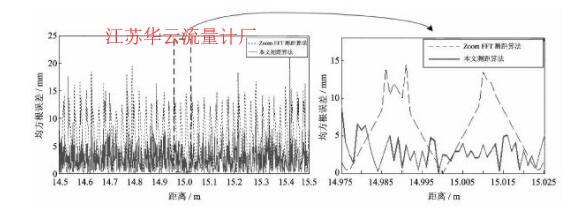
图3本文测距算法与Zoom FFT测距算法的测距均方根误差Fig.3 The RMSE of the proposed range measurement algorithm and Zoom FFT algorithm
由图3可看出,本文采用的测距算法均方根误差在10mm以下,远小于只采用FFT算法的测距误差,而且比Zoom FFT算法也要小很多.只采用Zoom FFT算法时,若实际距离对应的频率在Zoom FFT的离散谱线间隔中,测距误差依然很大,***大测距误差接近2cm,这是因为Zoom FFT的细化倍数有限,仍然存在一定程度的栅栏效应.本文采用测距算法在进行Zoom FFT后又通过能量重心校正算法进一步消除栅栏效应,使测距误差降低到毫米量级,同时由于能量重心算法的计算量很小,本文算法总体计算量和存储空间与Zoom FFT近似.
5、结论:
本文针对毫米波FMCW雷达液位计的应用场合,提出了Zoom FFT与能量重心校正算法结合的高精度信号处理算法,采用了Zoom FFT进行细化倍数较小的频谱细化,使用能量重心校正算法估计差频信号频率,该算法消除了FFT栅栏效应对测距精度的影响,且计算量和运算存储空间都比较合理. 仿真结果表明,当差频信号的信噪比为12dB时,该算法将测距均方根误差控制在毫米量级.
