

磁致伸缩液位计
随着工业自动化的不断发展, 液位测量仪表的精度要求不断的提高, 磁致伸缩液位传感器是综合利用磁致伸缩效应、浮力原理、电磁感应、电子技术等多种技术研制而成的液位测量仪表。本文分析了磁致伸缩液位计的工作原理, 传感器结构, 电磁感应线圈设计及电子信号处理技术的原理, 论证了在提高传感器精度方面的优势, 为产品化的磁致伸缩液位计设计提供了一种可靠的实现方案。
1、引言:
随着科学技术的迅猛发展, 尤其是新材料的不断涌现和计算机、通信技术的飞速发展, 液位测量原理和测量方法在不断发展和更新;同时, 工业生产也对液位测量提出了越来越高的要求, 要同时满足高准确度、大量程、多参数测量的要求, 传统的浮子式、电阻式、电容式、超声波等液位传感器都不能很好地满足这些测量要求, 采用磁致伸缩液位传感器, 使这些问题得到了较好的解决。
磁致伸缩液位计是利用磁致伸缩材料的磁致伸缩效应来实现位移的测量, 它具有量程大、非接触式、精度高等特性, 因而广泛应用于机械、机床等行业, 而在液位测量领域, 磁致伸缩液位计则广泛应用石油、化工等需要测量液位信号的场合。国外磁致伸缩液位计量程***高可达到30m, 传感器测量精度可高达0.01%FS, 并且可以测量位移、液位、温度等多参数信号。
2、主要工作原理:
磁致伸缩液位计是基于磁致伸缩效应。铁磁材料或亚铁磁材料在居里点温度以下于磁场中被磁化时, 会沿磁化方向发生微量伸长和缩短, 称之为磁致伸缩效应, 又称焦耳效应。磁致伸缩的产生是由于铁磁材料在居里点温度以下发生自发磁化, 形成大量磁畴, 并在每个磁畴内晶格发生形变。在未加外磁场时, 磁畴的磁化方向是随机取向的, 不显示宏观效应;在有外磁场作用时, 大量磁畴的磁化方向转向外磁场磁力线方向, 其宏观效应表现为材料在磁力线方向的伸长或缩短。
其材料变形的大小用磁致伸缩系数λs来度量, 即λs=ΔL/L。式中, L是受外磁场作用的物体总长, ΔL是物体长度尺寸变形量。常用磁性材料的磁致伸缩系数如表1所示。
表1


20世纪80年代少数工业强国如美国、德国, 利用磁致伸缩原理开发出了位移传感器, 之后美国MTS公司首先将磁致伸缩原理用于液位测量技术上, 开发出测量油罐液位的传感器。磁致伸缩效应在长度测量、位移测量等方面得到了广泛的应用, 而在液位测量中的应用只有几十年的历史。
磁致伸缩液位计主要由导向管、表头和浮子组成, 导向管内装有磁致伸缩波导丝, 浮子内装有磁钢, 表头内装有检测线圈和电路组件, 浮球浮在液面上, 导向管穿过浮球中心垂直插在液体中。液面变动时, 浮球沿导向管上下运动。液面的高度与浮球高度一一对应。工作时, 电路组件发送一个电流脉冲给波导丝, 此电流脉冲在波导丝周围产生一个脉冲磁场, 当这个脉冲磁场与浮子中的磁钢磁场相遇时, 产生磁场切变, 该切变磁场作用于浮球所在位置的波导丝, 在波导丝局部范围激发长度变化, 该长度变化又激发磁场脉冲。波导丝局部长度变化是一个纵波, 当纵波沿波导丝向表头方向传播时, 其激发的磁场脉冲一起沿波导丝传向表头, 当磁场脉冲到达表头内检测线圈时, 在检测线圈内感应一电压脉冲, 电路组件测量出从激励电流脉冲发生到电压脉冲接收之间的时间差tt, 用纵波沿波导丝运动速度v除t, 就得到纵波运动距离, 也就是浮球到表头的距离s。电路组件用该距离s结合用户输入的另、满信息计算出输出电流值, 该输出电流值经数模转换器变换成4~20m A电流输出。
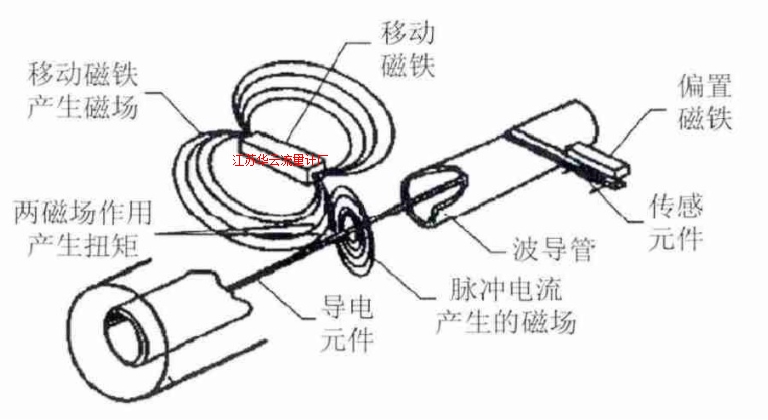
图1 液位传感器物理原理框图
波导管中超声波的传播速度一般在1800~2000m/s。当计时频率为200MHz时, 以超声波传播速度2000m/s为例, 液位传感器的测量分辨率Δ= (2000m/s) /200MHz=0.01mm。由此可见, 只要计数脉冲的频率足够高, 磁致伸缩液位传感器的理论分辨率可以达到无穷小, 实际上可以达到甚至优于0.01mm, 而且还可采用温度补偿等措施, 所以磁致伸缩传感器能够达到很高的准确度。
3、传感器结构设计及信号检测:
3.1、传感器结构设计:
传感器由法兰、连接导线、双波导丝、感应线圈、骨架、屏蔽器、保护套管、磁铁组件、外壳、阻尼器、连接线、固定块和测量电路几个部分组成。在每根波导丝的同侧端部分别设有感应线圈, 感应线圈缠绕在高稳定性骨架上, 屏蔽器分别包围在感应线圈外部, 波导丝穿过骨架内孔, 两端分别与连接导线电气连接, 在波导丝的另一侧端部则分别设有阻尼器并用连接线相连。
图2为一种典型的安装于储罐中的液位传感器总体结构图。测量电子单元在罐体之外, 包括脉冲发生、回波接收、信号检测与处理电路。由不锈钢或铝合金材料做的保护套管套在波导管外, 插入液体中直达罐底, 底部固定在罐底。磁浮子可以有两个, 一个测量油位, 另一个安放在波导管对应的油水界面处, 用于测量界位。若在波导管底端再设置一块磁铁, 还可以完成自校正功能, 使传感器无须定期标定。
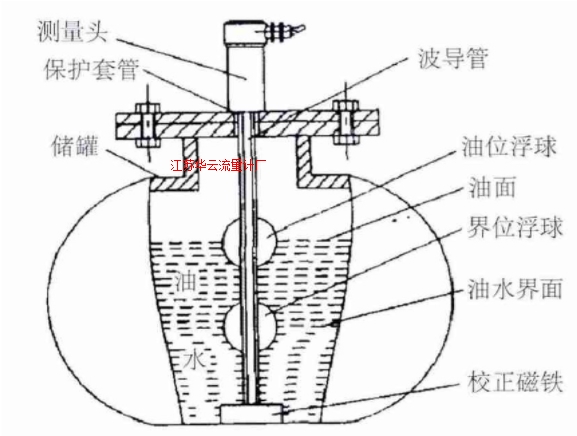
图2 磁致伸缩液位计传感结构
3.2、传感器信号检测:
如图3所示, 当磁致伸缩波导丝上有纵向电流脉冲通过时, 沿波导丝产生脉动环形磁场, 在浮子出同时受到永磁场纵向磁场的作用, 图中Ho为轴向稳恒磁场, He为脉动环形磁场, 二者的合成磁场是螺旋形的, 脉动的螺旋磁场导致了螺旋形的磁致伸缩应变, 因而形成脉动的扭转振动, 该扭转振动以超声波的形式向波导丝两端传播。磁致伸缩材料在外力作用下, 引起内部发生形变, 产生应力, 使材料的磁化强度和磁导率发生相应的变化, 这种由于应力使此行材料性质变化的现象称为逆磁致伸缩效应。
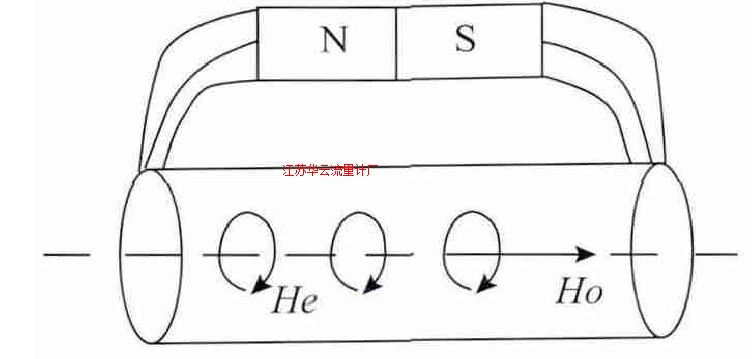
图3 敏感材料液位处磁场分布
具有恒定磁场感应强度B0的铁磁棒形变时, 由于磁化状态的改变, 附加的磁场强度为:
式中:
H为附加的磁场强度;
S为应变;
 为磁致伸缩应力常数, 是B0的函数。
为磁致伸缩应力常数, 是B0的函数。
分析磁铁和线圈局部, 线圈开路, 跟据安倍环路定理:
式中:
φσ为漏磁通;
RΛσ为漏磁通通过的气隙磁阻;
φδ主磁通;
RΛδ为主磁通通过的气隙磁阻;
H为主磁通经过的带材内部磁场强度;
l为带材上主磁通经过的有效长度;
Hm为永磁铁内部磁场强度;
lm为磁铁的长度。
忽略漏磁通影响, 简化计算, 得出:
当带材振动, 所带来的应变产生附件的磁场强度:
因此:
式中:Hm、lm、RΛδ、H、l均为常量。
求导可得:
已知:
式中:N为线圈匝数。
将式 (4) 、 (6) 代入式 (7) , 得出线圈上的感应电动势:

因此, 当极化的铁磁材料发生形变时, 要加大线圈感应电动势, 需要采用以下措施:
(1) 增加线圈匝数N, 同时考虑放大电路的要求, 线圈匝数不宜过多, 以免线圈阻抗过大。
(2) 增加永磁铁的磁感应强度 , 同时也要避免带材的磁饱和。
, 同时也要避免带材的磁饱和。
, 同时也要避免带材的磁饱和。
(3) 减小永磁铁与带材的气隙磁阻RΛδ。
(4) 增加单位时间增强扭转信号的强度d S/dt。
(5) 增加l, 但是带材上的应变是由于振动产生的, l过长, 会导致在检测有效长度内同时有若干个振动周期, 使线圈内信号变得杂乱。
4、硬件及软件设计:
4.1、硬件设计:
磁致伸缩液位计以C8051单片机为核心, 利用变增益运算放大器对信号进行变增益放大, 保证信号检测幅度恒定。激励脉冲到检测感应脉冲的时间差利用TDC的高频时间芯片实现, 类似于频率检测的测周期法。硬件检测原理示意图如图4所示。
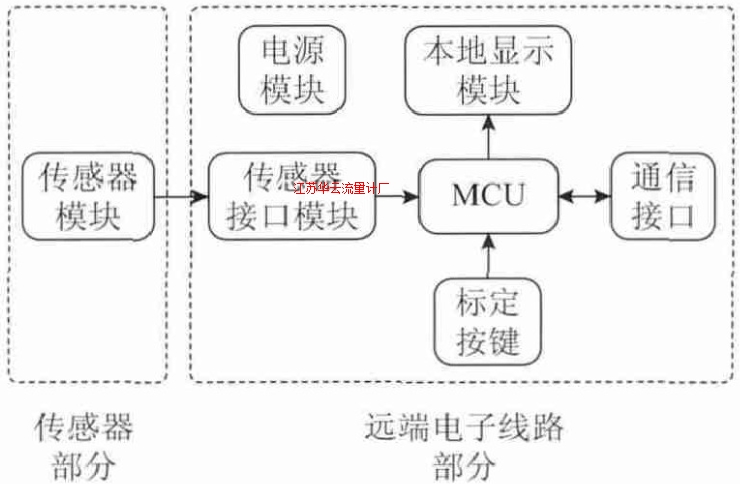
图4 硬件结构示意图
C 8 0 51单片机是完全集成的混合信号系统级MC U芯片。集成了12位模数转换器、内部2.4V基准源、2路12bytes数模转换器以及UART接口, 25MIPS的指令速度完全保证了单片机在磁致伸缩液位仪应用中的良好实时性。
差动放大电路将两路检测单元输出的相位相反的检测脉冲进行放大, 消除信号中的共模干扰, 提高信噪比。
二线制取能、储能电路有着其独特的设计要求, 换能器得工作电压、电流消耗的短视功耗远超过二线制仪表的***大允许指标, 故需要采用合理的储能技术来减小换能器工作时带来的输出电流波动。本次4~20m A电流输出分为3部分设计, 一路为控制系统启动时产生一个20m A的大电流, 这个电流将迅速的为整个系统的储能电路充电, 保证系统可尽快进入稳定的工作状态, 当仪表正常工作后, 此电流会通过软件控制关闭输出;另一路电流为控制到3.5m A的一个偏置电流, 该电流保证了PWM控制信号即使不输出, 系统也有一个稳定的低报警电流信号输出;***后一路控制电流为PWM形式的V/I转换电路, 该电路模块主要实现了物位信号作为标准4~20m A的电流信号变送输出。
4.2、软件设计:
软件的工作主要为采集现场传感器的输入信号, 处理成相应的距离值, 再同具体的设定值进行计算后输出相应的报警信号, 负责协调和处理通信中断的相应数据配置信息;软件功能框图见图5。
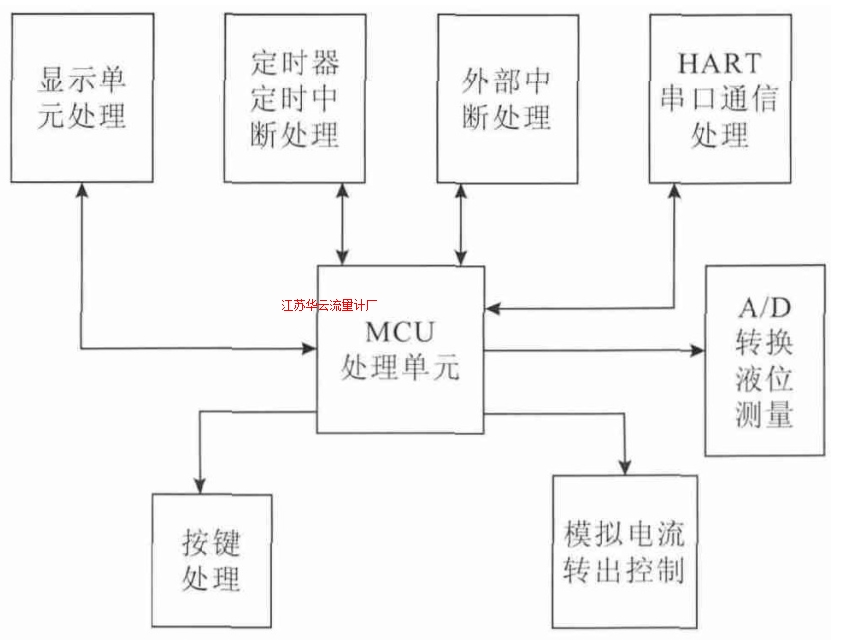
图5 软件结构示意图
软件设计分为:主程序模块、初始化模块、数据处理模块、人机界面处理模块、通信模块, 各个模块程序框图如图6、图7所示。
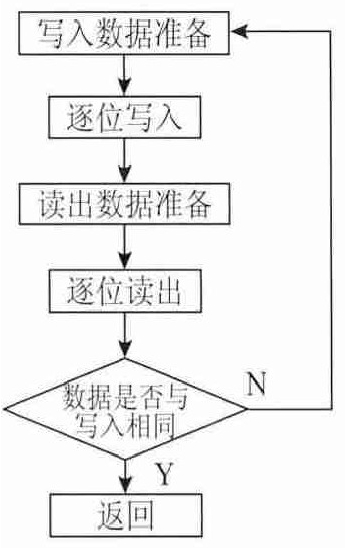
通信程序, 即HART协议数据链路层和应用层的软件实现, 是整个智能变送器软件设计的关键。数据链路层软件主要就是串行口接收/发送中断子程序, 属于中断处理 (服务) 程序;应用层的软件是对收到的命令帧进行翻译和处理, 在主程序中被调用。通信发送流程如图8所示, 通信接收流程图如图9所示。
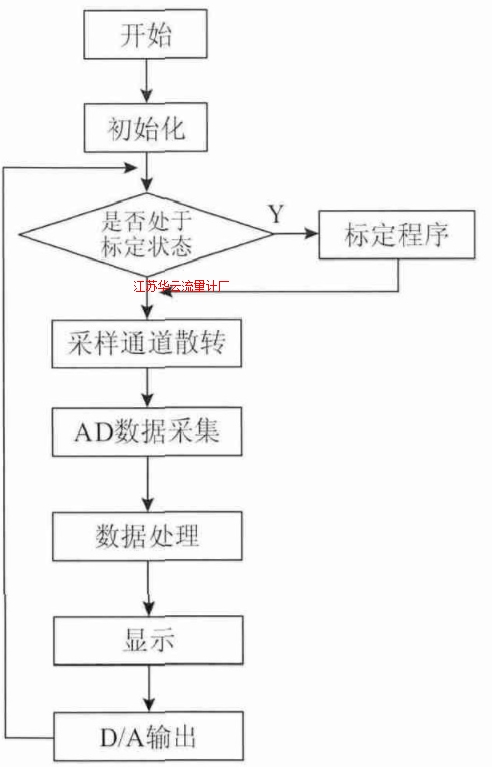
图6 主程序模块
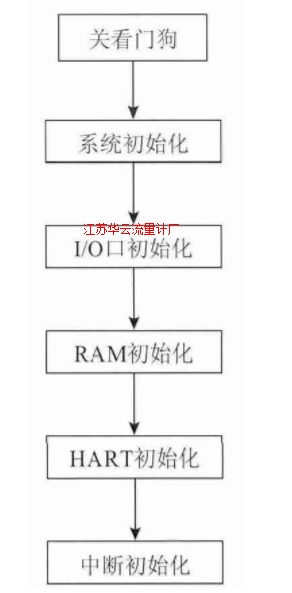
初始化模块
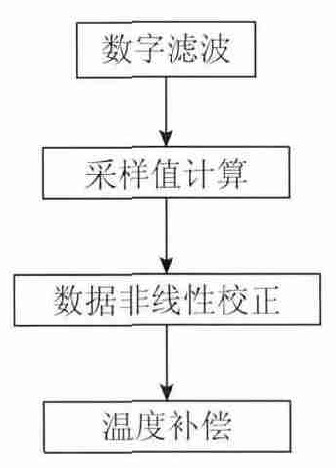
图7 数据处理模块
人机界面模块
5、结论:
磁致伸缩液位计安装于垂直并具有刻度的标准液位计鉴定平台上, 浮子利用实验台上的游标卡尺加以固定, 通过钢丝控制游标的升降, 对辞职伸缩液位计量程的0%、25%、50%、75%、100%进行5点的精度检定, 其结果满足±0.05%的测量误差及±0.1mm的要求, 达到了高精度准确测量的效果。
“磁致伸缩液位计”产品的开发打破了国外对高精度测量液位计技术的垄断, 实现了对其关键零部件的自主创新, 掌握了产品的关键工艺技术, 提升了液位工业的技术、工艺水平。
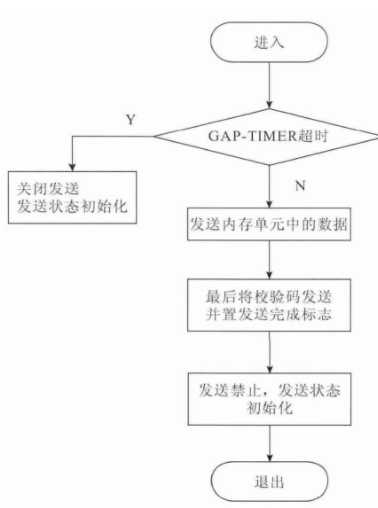
图8 通信发送流程图
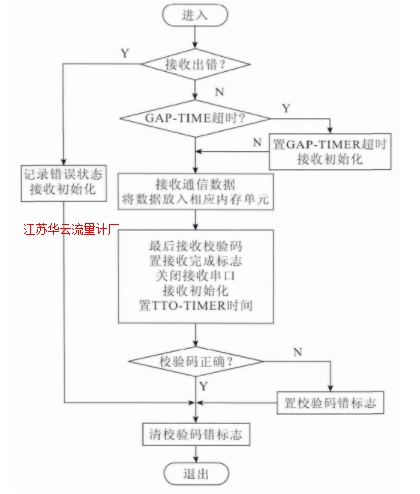
图9 通信接收流程图
