

储油罐导波雷达液位计
摘要:导波雷达液位计被广泛用于测量储油罐的油脂液位。但是由于储油罐本身不能满足导波雷达液位计的安装要求, 导致测量液位不准确, 测量结果存在大量噪声。为此, 文中使用测量液位曲线的平滑度作为雷达液位计的置信度, 针对低置信度的测量结果, 使用相邻测量点的液位变化速度特征对测量结果进行滤波后处理, 以有效去除噪声, 从而提高测量结果的准确度。
0、引言:
随着油脂储备工作的重视与发展, 油脂监管已成为粮油企业的一项重要工作[1,2,3,4,5,6,7,8,9,10,11]。由于储油罐体积庞大, 储存油脂多, 直接测量油脂数量或者体积难以实现, 因此, 通常通过测量储油罐的油脂液位、油脂的温度, 结合罐体尺寸、油脂密度随温度变化曲线来计算油脂的体积和质量, 从而实现油脂的监管。因此, 如何实现储油罐液位的准确测量一直是粮油企业中普遍存在的问题[2,3,4]。
导波式雷达液位计把导波杆伸入被测液体中, 通过导波杆发射和接收信号。导波雷达液位计虽然需要接触被测液体, 但由于使用了导波杆作为传输介质, 因此, 信号损耗小, 能量比较集中, 回波质量好, 能够测量介电常数很低的介质 ;而且, 它还具有方向性好、信号频率低和穿透性好的优点。因此, 导波式雷达液位计在储油罐的油脂液位测量任务中应用十分广泛[5,6,7,8,9,10,11]。
为达到测量精度, 导波式雷达液位计需要满足以下安装要求[5]:
(1) 必须垂直向下安装导波雷达液位计, 倾斜度***大不能超过3°;
(2) 雷达的波束中心距容器壁的距离应大于由波束角、测量范围计算出来的较低液位处的波束半径 ;
(3) 雷达的波束途径应避开搅拌器等其它障碍物及容器。
但是, 在实际的储油罐中, 液位计的安装位置会受到储油罐结构的限制, 经常无法完全满足上述安装要求。例如, 罐顶内部结构只允许雷达液位计安装在罐壁边上, 使得安装条件 (2) 无法满足 ;另外, 为了将雷达液位计固定在罐顶, 需要根据情况在雷达液位计上增加结构件, 导致雷达的波束途径不能完全避开结构件的影响等。当液位计的安装要求不完全满足时, 罐壁、障碍物将会产生大量的干扰性回波, 使得液位测量结果中包含噪声, 测量结果不准确。尤其是, 当储油罐中油脂液位接近罐顶, 即雷达液位计距离液面很近时, 这种干扰性回波的影响更加明显。
针对上述问题, 本文利用数字信号处理技术, 通过分析某个液位计一段时间的液位测量结果, 来评估该液位计测量结果的置信度, 即该液位计测量结果的可信程度。根据置信度估计值, 能够从大量仪器中筛选出测量不够准确的液位计。一方面, 提醒维护人员有针对性的进行维修 ;另一方面, 后续的信号处理系统能够对低置信度的测量结果进行滤波处理, 滤除噪声信号。本文使用相邻测量点的液位变化速度特征对信号进行滤波。实验表明, 使用基于测量曲线平滑度的置信度估计和基于相邻测量点液位变化速度的滤波器能够有效鉴别并滤除液位测量结果中的噪声信号, 提高液位测量结果的准确度。
1、传统导波雷达液位计液位测量系统:
图1所示是已有导波雷达液位计的液位测量系统结构框图。该测量系统由处理器、液位测量模块和信号传输模块构成。此外, 由于在油脂监管任务中, 需要获得油脂密度, 因此液位测量系统通常兼具温度测量模块, 通过油脂温度, 经过查表可以知道在该温度下, 某品种油脂的密度。该系统利用导波雷达液位计获取罐内的液位高度信息, 并转换为4-20 m A的模拟信号, 经过精密电阻采样将电流信号转换为电压信号, 再通过高精度ADC转换为数字信号, 微处理器即可获取储油高度信息, 控制GPRS将信息发送给上位机。
2、置信度估计与滤波器设计:
一般的液位测量系统中, 上位机接收到的液位测量结果中可能包含大量噪声, 本文提出一种基于置信度估计的滤波算法, 用于对测量结果进行滤波去除噪声, 从而提高测量精度。为了有效去除液位测量结果中的噪声, 并减少计算量, 该算法首先估计测量结果的置信度, 针对低置信度的测量结果, 使用相邻测量点的液位变化速度特征对测量结果进行滤波处理。
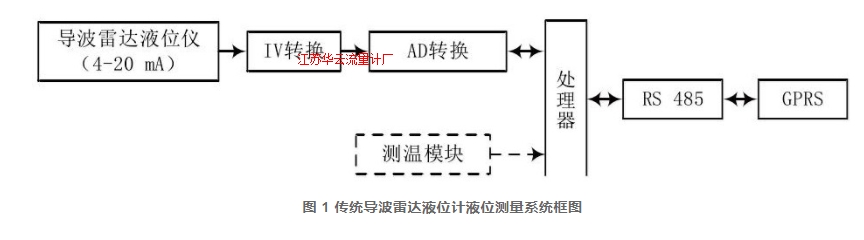

图 1 传统导波雷达液位计液位测量系统框图
图2所示是其算法流程, 设导波雷达液位计的液位测量结果为Ori H (i) , 其中i表示第i个测量结果, Rev H (i) 为处理后得到的液位修正值。算法首先计算当前测量液位曲线的平滑度, 从而得到置信度Conf (i) , 对置信度低于或等于设定阈值Thr Conf的测量结果进行滤波, ***后获得Rev H (i) 。
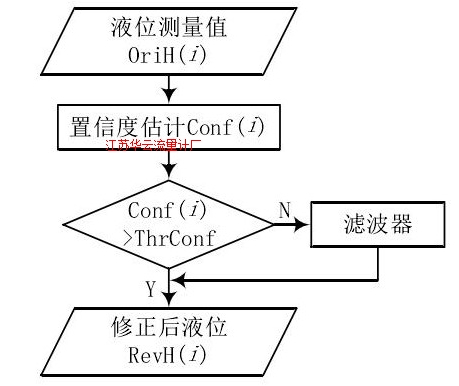
图 2 信号处理算法流程图
2.1、置信度估计:
在大型储油罐的油脂储存中, 油脂储存的时间一般较长, 油罐进油、放油的频率较低, 因此, 油脂数量基本不变, 液位仅仅是由于油脂温度变化引起的微小变化。即使是在进出油过程中, 由于储油罐截面积大, 液位变化的速度也较慢。因此, 实际的液位变化曲线应变化较为平缓。通过计算在过去24小时内液位测量结果曲线的平滑度, 就能够估计该测量结果的置信度。设Dif (i) 表示第i个观察点的前24小时测量结果曲线的平均一阶差分, 如公式 (1) :
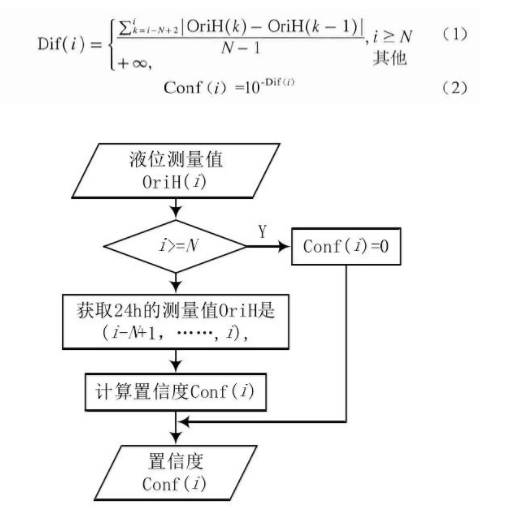
图 3 置信度估计算法流程
2.2、滤波器的设计:
在大型储油罐的油脂储存中, 引起实际液位变化的因素有两个 :一是油脂温度变化 ;二是进出油。其中, 温度引起的液位变化随着温度不同、罐体横截面积、油脂种类而变化, 但都具有变化范围小的特点 ;油脂的正常进出油作业通常需要持续一定时间, 例如在20分钟内液位均在上升或下降, 且油脂进出油时液位变化速度应在一定范围内。综上所述, 可以通过测量结果中液位的变化速度来判定该测量值是否正常, 并修正判定为异常的测量结果。详细的滤波流程如图4所示。
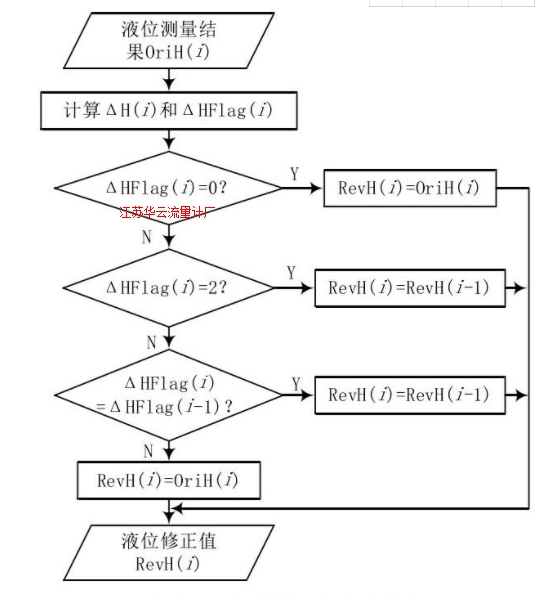
图 4 滤波算法流程图
设Δt表示液位采集间隔时间 (单位为分钟) , ΔH (i) 表示相邻测量点的液位变化速率, ΔH (0) 初始化为0, 当i ≥ 1时, 计算公式如公式 (4) 所示 :

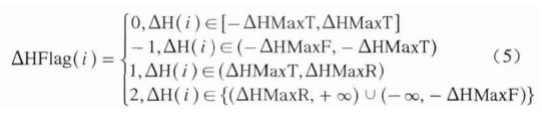
另外, 设ΔHMax T表示在Δt时间间隔内, 温度变化引起的液位***大变化速度 ;ΔHMax R表示在Δt时间间隔内, 进油引起的液位***大变化速度 ;同理, ΔHMax F表示在Δt时间间隔内出油引起的液位***大变化速度。上述ΔHMax T、ΔHMax R和ΔHMax F参数可由经验设定, 或液位测量结果中统计得到。当ΔH (i) 在 [ -ΔHMax T, ΔHMax T] 之间时, 认为液位变化是由温度引起的, 当前测量值较为准确, 因此Rev H (i) =Ori H (i) ;当 ΔH (i) 在 (ΔHMax R, + ∞) 时, 液位升高的速度超过了进油的***大速度, 认为该测量值为噪声, 则取前一个测量结果的修正值, 即Rev H (i) =Rev H (i -1) ;同理, 当ΔH (i) 在 (-∞, -ΔHMax F) 时, 液位降低的速度超过了出油的***大速度, 认为该测量值为噪声, Rev H (i) =Rev H (i – 1) ;当 ΔH (i) 在 (-ΔHMax F, -ΔHMax T) 时, 认为当前时刻油罐正处于放油工作中;当ΔH (i) 在 (ΔHMax T, ΔHMax R) 时, 认为当前时刻油罐正处于进油工作中。为计算方便, 使用中间ΔHFlag (i) 代表ΔH (i) 的取值范围, ΔHFlag (0) 初始化为0, 当i ≥ 1时, 计算公式如公式 (5) 所示:
3、实验结果及其分析:
3.1、实验数据:
为验证算法的有效性, 本文采集了210个储油罐液位测量系统的实际测量结果。该液位测量系统使用本文所述的测量系统实现, 储油罐位于我国某省内的多个粮库, 测量结果为2014年4月份某天的数据。210个数据样本中, 有26个样本包含大量噪声。然后对这些测量结果使用本文滤波算法进行处理。
3.2、实验设置:
系统液位采集间隔时间 Δt设为5分钟, 此时N=288, 为简化算法, 忽略各油罐体积不同、油脂品种不同的影响, 设各油罐的ΔHMax T、ΔHMax R和ΔHMax F参数相同。使用184个不含噪声样本做参数统计, 可得 ΔHMax T为0.008 m, ΔHMax R为0.06 m, ΔHMax F为0.06 m。
3.3、实验结果:
3.3.1、置信度估计:
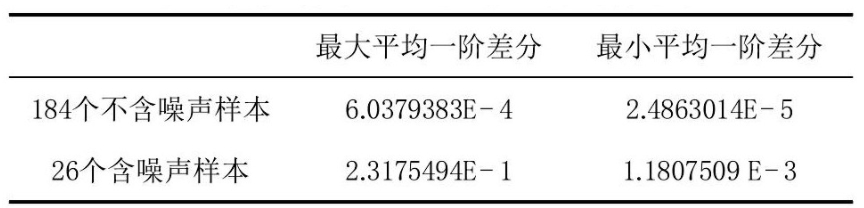
设样本X (x1, x2, ……, xi, ……) 代表某个导波雷达液位计的液位测量结果, 由公式 (1) 计算出第i个测量结果对应的平均一阶方差Dif (i) , 实验通过计算所有样本点中满足i>=N (即i>=288) 条件的平均一阶差分Dif (i) , 发现在184个不含噪声的样本中, ***大的Dif为6.0379383E-4, 而26个含噪声样本中, ***小的平均一阶差分为1.1807509 E-3, 如表1所列。
由上述结果可知, 平均一阶差分能够很好地区分不含噪声样本与含噪样本, 因此, 由平均一阶差分计算得到的置信度能够代表测量结果的可信程度。
表 1 两类样本的平均一阶差分计算结果
3.3.2、滤波算法:
根据上述实验结果, 将置信度阈值Thr Conf设为10-0.001, 图5所示的是某个液位测量结果在滤波前后的比较。其中上图表示滤波前的液位测量结果曲线, 下图为滤波后的曲线。
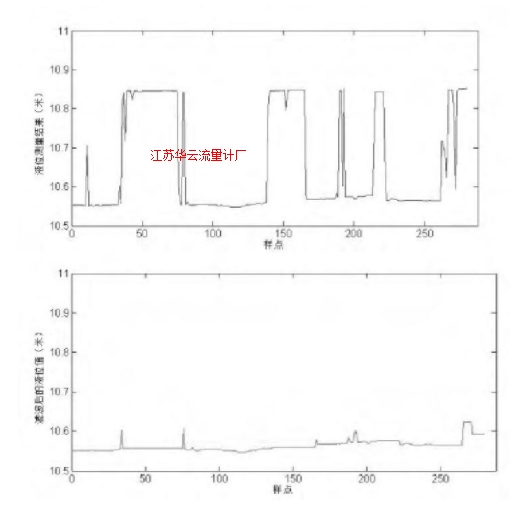
图 5 某个液位测量结果在滤波前后的比较
3.3.3、实验分析:
结合实验结果可知, 平均一阶差分能够很好地区分含噪声样本与不含噪声样本, 因此, 基于平均一阶差分的置信度具有对含噪测量结果的良好鉴别能力。本文所述的滤波算法实验结果说明, 本文提出的滤波算法能够有效滤除测量结果中包含的噪声信号, 可对液位测量结果进行修正, 提高液位测量的准确度。
4、结语:
本文提出了一种基于置信度估计的滤波算法用于去除导波雷达液位计液位测量结果中的噪声。该算法首先通过测量结果曲线的平滑度来估计测量结果的置信度, 对于置信度低的测量结果, 采用基于液位变化速度的特征进行修正, 从而得到修正后的液位值。经实验验证, 该算法能够有效滤除噪声, 提高导波雷达液位测量结果的准确度。
