

涡轮流量计校准方法
在理想状况下,某一涡轮流量计的仪表系数在稳态条件下,应是一定值。然而,在实际测量过程中,涡轮流量计的仪表系数 K 会随着温度、压力、介质粘度、量程等不同实验工况的变化而产生数值波动;同时,不可忽视的是,随着使用时间的增加,流量计必然会出现因介质、环境、部件腐蚀以及磨损造成的仪表系数的波动,使得测量结果大受影响,偏离实际值。因此,在流量计使用的整个周期中,需对其进行定期地校准[15]。实际工程应用中,每一个出厂的涡轮流量计都会由厂家对其进行标定,方便用户的使用。
流量计的校准,顾名思义,就是对产生变化的流量计仪表系数进行重新的设定,以满足测量的需要。流量计校准的普遍原理是将被校流量计的显示流量与标准流量进行对比,利用式 1.1 得到新的仪表系数 Knew代替原仪表系数 K。根据标准流量产生的不同方式,把流量计的校准方法分为三大类,即质量法、容积法和标准仪表法[16]。
流量计的校准,顾名思义,就是对产生变化的流量计仪表系数进行重新的设定,以满足测量的需要。流量计校准的普遍原理是将被校流量计的显示流量与标准流量进行对比,利用式 1.1 得到新的仪表系数 Knew代替原仪表系数 K。根据标准流量产生的不同方式,把流量计的校准方法分为三大类,即质量法、容积法和标准仪表法[16]。
进行涡轮流量计校准的前提是建立正确的流量计动态模型,以确定出能够合适地反应被校流量计动态指标的参数。前人对此作出了不懈的努力。Thompson 和 Grey[17]在上世纪七十年代***先建立了涡轮流量计的动态模型。冯畅和龚家彪[18]指出了在 T-G 模型(Thompson-Grey 模型)中存在的缺陷,并对模型进行了修正。通过修正后的模型得到的涡轮流量计理论仪表系数与实际值之间的偏差由原来的±(4%~6%)减小到了±1.5%,极大提高了此模型的准确性。在此基础上,殳伟群等[19]对其进行简化,忽略了流体的粘度和流量计自身的静摩擦力影响后,将 T-G 模型变形为如下的动态方程

式中,Ks是静态仪表系数;Q 是流量计显示流量;是流量计折合转动频率;Kd是动态仪表系数。
由式(1.3)可知涡轮流量计具有一阶非线性系统的特征。对流量计进行静态校准时,将被校流量计置于稳态流体中,即涡轮转动频率的变化率为 0,实际流量值和涡轮的转动频率成正比,可用来校准 Ks,其量纲为脉冲数/L,它的物理意义是流量计流过单位体积液体产生的脉冲数,此时式(1.3)等效为式(1.1)。对流量计进行动态校准时,将其置于非稳态流量中,那么涡轮转频的变化率不为 0,结合稳态校准得出的 Ks,可以解出动态方程中的另一个参数 Kd,其量纲为 L,它的物理意义是对处于稳态的涡轮流量计施加一扰动后,Kd体积的流体流量能使流量计过渡到下一稳态的 63.2%。因此,动态仪表系数其实可以看作是涡轮流量计在某体介质中运动惯量的一种度量。在量程范围内,流量计的静态仪表系数和动态仪表系数都近似可以看作常数。
动态校准涡轮流量计的方法是用动态流量去激励它,而后利用流量计的动态响应曲线,求出动态仪表系数。如前所述,涡轮流量计的动态模型是一个一阶非线性方程,为了对其进行解析分析,首先需要对其进行线性化。注意到,当 Q 在极短时间内过渡到稳态值时,可将其视作一个定值,式(1.3)也就可以视为线性方程,其解为
式中,τ=Kd/Q,物理意义上可认为是流量计对于激励流量 Q 的时间常数。由图 1.3 可知,时间常数 τ 并不是个定值,而 Kd=τ·Q 却是个定值。如果能够通过实验在不同稳态流量(Q1、Q2、Q3)获得如图 1.3 中的一组曲线,便可以估计出 Kd的值。对涡轮流量计来说,转子质量轻,惯性小,
时间常数 τ 是个很小的数值。一般来说,用于航空发动机地面试验的涡轮流量计时间常数 τ 的量级在几十毫秒,为了实现对涡轮流量计的动态校准,必须要求在小于 τ 的时间内产生动态阶跃流量。
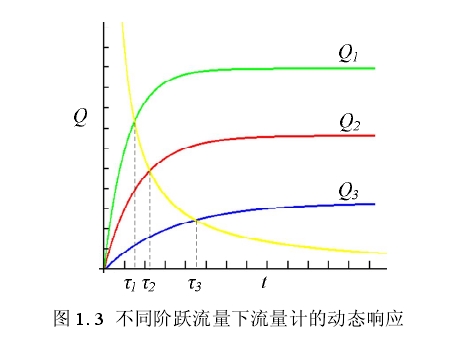
图 1. 3 不同阶跃流量下流量计的动态响应
国内外研究现状:
涡轮流量计经过几十年的发展,已经深入到生活与工业生产的各个层面。国内外的研究者对它的特性展开了深入的仿真和试验研究。
粘度效应是影响涡轮流量计性能的一个重要因素,但是粘度效应的流体动力学机理并未被完全揭示。Suna Guo[20]等通过多粘度(粘度范围:1.0×10-6m2/s~112×10-6m2/s)实验得到涡轮流量计的仪表系数和线性误差随粘度变化的曲线。这些曲线表明,随着流体介质粘度的增加平均仪表系数值呈下降的趋势,而线性误差则跟随粘度的升高而增大。此外,还通过 CFD 仿真分析了涡轮流量计内部的三维流场状况,证明了:流体的粘度变化会导致前导向器叶片后的尾流的改变,同时涡轮转子叶片前的流动速度场也会发生改变,继而影响转子叶片上的压力分布,***终影响到流量计的性能。该研究对于流量计动态校准具有一定的指导意义,即,在流量计校准时,应选择与实际应用时物理性质相同的流体介质,不同的流体介质会导致仪表系数的校准出现系统误差[21]。与液体流量计相比,涡轮流量计在低密度流体(如气体)中的动态响应得到了更好的认识并且对误差校正有着系统全面的方法。B. Lee,R. Cheesewright 和 C. Clark[22]等人通过实验探究了小量程液体涡轮流量计的动态响应。实验结果表明,虽然液体流量计和气体流量计存在着脉动频率和脉动幅值的差异,但是液体涡轮流量计和气体涡轮流量计遵从着类似的误差产生机制,可以应用相似的误差校正机制进行误差的修正。该研究对于本文探究小量程涡轮流量计的动态校准具有指导意义,尤其在误差分析方面。
李春辉和李鹏[23]研究了雷诺数对涡轮流量计仪表系数的影响。通过实验表明了在相同流量的不同压力下,同一涡轮流量计的示值误差超过 0.4%,依据涡轮流量计的物理模型,基于雷诺数采用曲线拟合的方法对不同压力下涡轮流量计的测试结果进行了分析与评估,并得到相应的不确定度,该不确定度约为 0.3%(k=2)。此项研究表明,为了通过校准获得的仪表系数,要在实验前对管路流体的流动状态进行分析,以保证在校准和实际使用时涡轮流量计置于相同的流动条件中,避免因此产生的误差。
M. Islam[24]等人研究了斜向速度场对涡轮流量计性能的影响。涡轮流量计的性能很大程度上取决于流量计上游流体介质的流动情况、流体性质和涡轮转子的几何参数。基于此,作者研究了斜向速度场对线性流动范围的下限、可用范围、仪表系数以及流量计造成的压降的影响。实验通过流量计上游四倍管径处的闸阀产生斜向的速度场。结果表明,速度场的小幅度倾斜不会对仪表系数造成影响,但是大幅度的斜向速度场会使仪表系数产生剧变。为了解决斜向速度场对流量计仪表系数的影响,在流量计上游设置了三种整流器。经实验验证,十叶片平板整流器的整流效果***好,可以将仪表系数的波动控制在标准值的±1.25%之内。
以上是对涡轮流量计的特性的研究成果,充分了解涡轮流量计的性能是对其进行校准的必要条件。下面将介绍国内外对流量计的校准方法开展的研究,以期对本文提出的动态校准系统起到启示的作用。
Yong Luo[25]等人通过对液体流动状态以及现场校准试验数据的分析,推导出流量计的非线性模型,将曲线拟合法应用到超声波流量计的校准中,这种方法不仅提高了校准的精度,而且大大减少了工作量及计算复杂性。类似的,Yan Yi[26]等针对传统的涡街流量计校准方法中不考虑流量计特性曲线的非线性性会导致很大的校准误差,提出了一种智能***优化算法——首先,利用 BP 神经网络算法为涡街流量计的特性曲线建模;然后,运用基因算法在特性曲线间断点自动寻找两个附加***优校准点;***终在新的校准点对流量计进行校准。该方法的运用大大减小了校准误差和测量误差。J. Aguilera[27]对动态条件下液体流量计的校准有着深刻的认识,提出了一种基于动态称重法的校准方法。校准过程中存在着流体的内力和称重系统的内力,该校准方法建立在对这两种相互作用力的充分分析之上。此方法的有效性已经通过试验得到验证。但是这种校准试验系统庞大,原理复杂,通用性不强。来自美国 NASA 的 Grady H. Stevens[28]证明了涡轮流量计的显示流量和实际流量之间存在一阶滞后的关系,提出了采用高精度压差式流量计来校准涡轮流量计。并尝试对流体施加以正弦扰动,欲通过此方法对涡轮流量计进行动态校准。这种校准方法可以看作是标准仪表法的一种,具有简易,可操作性强,重复性高等特点,但校准精度不高,而且在现今的涡轮流量计生产制造水平下,涡轮流量计的精度已大大超过了压差式流量计,这种校准方法变得并不可行。R. C. Baker[29]等基于流量计生产过程的实际需要,设计了一种电子校准系统。该系统通过油泵驱动液体流过被校流量计,使用上位机软件计算流量,并与流量计的显示流量进行计较。该校准方法属于容积法,校准精度尚可,但不可避免存在噪声扰动。R. Engel 和 H-J Baade 指出,在涡轮流量计校准的过程中,流体介质的密度是造成测量不确定度的主要因素之一。因而,在校准过程中介质密度的确定对测量不确定的分析来说是必不可少的。于此同时,指出了两种密度相关效应——一是校准时管道温度和介质温度不同的话,可能因为他们自身热膨胀系数的差异而导致校准结果存在系统误差;二是噪声干扰是任何一个校准系统不可避免的问题[30,31]。
如 1.2 节,为了对流量计进行动态校准,必须在几十毫秒时间内产生稳定的阶跃激励流。不难想象,在如此短的时间内,让流体介质克服各种摩擦力,阻尼和惯性,快速完成加速过程,是很困难的。殳伟群等提出了一种利用电磁机构控制的顶针装置,即用一刚性极大直径很小的顶针装置,伸进或抽出涡轮流量计叶片空档,用来控制叶片的转动与否。涡轮流量计是一种速度式仪表,对应于体积流的响应。这种方法可以看成是一种体积流阶跃法,此方法让涡轮流量计转子叶片直接和顶针装置接触,对叶片造成一定的损伤。
殳伟群[32]还提出过一种用正弦脉动流动态校准涡轮流量计的方法——在流量计所在的主油路旁添加一副油路,用一机械机构,可以是往复活塞或者是旋转叶片,利用其机械运动产生具有正弦特征的激励流量。将此正弦流叠加到主油路的稳态流中。通过此方法也可将式(1.3)线性化,***后的问题归结为求一阶线性方程的截止频率。但是这种方法有其局限性:在改变脉动流频率的过程中,虽然可以保证扰动产生装置(往复活塞或旋转叶片)的运动幅度恒定不变。但是由于连续扰动源和流量计的管路具有流阻流容和相应的低通特性,无法保证扰动流量在到达流量计入口截面时,其幅度仍然是不变的。产生的后果可能是得出的截止频率并不是流量计的截止频率,而是流量计和脉动源出口至流量计入口管段构成的系统的截止频率。
注意到,时间常数 τ=Kd/Q=1/K1K3ρv(K1、K3均为与流量计相关常数),与其说决定涡轮流量计阶跃过程时间长短是体积流,不如说是质量流。通过介 质密度的瞬变可以达到质量流的阶跃,而不是通过流体速度的瞬变实现体积流的阶跃。具体实现方法是:在同一试验管道里分割两个试验段,前段是空气,后段是液体介质。先由空气推动涡轮流量计转动,接着打开阀门液体流入实现涡轮流量计进口处的质量阶跃。 梁国伟[33]提出了一种新型的双时间法计数器,并成功将其应用于脉冲型流量传感器的校准。这种双时间法计数器实际上是一台脉冲型流量传感器校准仪。计数器操作简单,稳定可靠,且性价比高,可大大缩短校准时间,同时大量程的流量计也可用较小的标准容器来检测,只是校准的精度不高,限制了它的广泛使用。
