

直位移磁浮子流量计测量方法
bstract: There are specific function relationships between the amount of flows and displacements of floater. We obtain the exact flows through measuring the floater displacements. The angular displacement is adopted traditionally, and the direct displacement is,a kind of new measurement based on the angular displacement, which has eliminated the coupling magnetic steel and measuring magnetic steel. Compared to the angular measurement, this method simplifies device structure and saves the expenses. This article introduces the measure methods and principles of direct displacement magnetic float flow meter, particularly in signal process, algorithm, experiment statistics and results.
Key words: Magnetic float flow meter; Angular displacement; Direct displacement; Magnetic steel; Hall element
浮子上下游的压差为:

式中:Af—浮子的迎流面积;C—阻力系数; ![]()
![]() —流体介质密度;v—流体速度;Vf—浮子的体积;
—流体介质密度;v—流体速度;Vf—浮子的体积; ![]()
![]() f—浮子材料的密度;g—
f—浮子材料的密度;g—
重力加速度。
由式(1)知,流体流过环形面积的平均流速v是一个常数。瞬时体积流量定义为流体流过流通面积的单位体积。由体积流量的定
义知,qv=Av,在v为常数的情况下,qv与流通面积A成正比。
1.2、流量和磁浮子高度的关系:
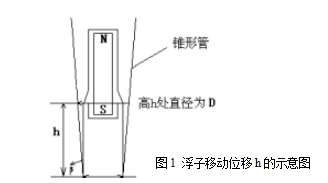
图1 浮子移动位移h的示意图
如图1所示,环形流通面积A由浮子和锥形管尺寸确定,即:
A= π4(D2-Df2)
![]()
![]()
式中:D—浮子所在处的锥管内径;Df—浮子的***大内径。设锥管的锥角为![]()
![]() ,令刻度处锥管内径为Df,则在浮子高度为
,令刻度处锥管内径为Df,则在浮子高度为
h处有:
| D = Df+ 2h tan | ||||
| π | ||||
| 所以: | = | =(2Df+ 2htan )(2htan | )=πDf | |
| 4 | ||||
| htan + πh2tan 2 | ||||
| 因为锥角β很小,所以πh2tan 2项可以忽略,那么A近似为: | ||||
| A =πDf htan | ||||
| 所以,瞬时流体体积流量的表达式为: | ||||
| qv = Av =πDf h tan | (2) | |||
对于一定的流量计和一定的流体,式(2)中的Df、Af、Vf、ρf、β、ρ均为常数,所以只要保持阻力系数c为常数,则流量qv与浮子高度h之间就存在着一一对应的近似线性关系。根据浮子的高度,可以直接测出流量值。
1.3、浮子高度的转换方法:
(1)浮子位移的定义
浮子行程是直线型的称为直位移,浮子行程是圆周旋转型的称为角位移。流量为零时磁浮子位置称为零位移,流量为满量程时,浮子的位移称为***大位移。直位移式磁浮子运动的整个行程大约为一个浮子的高度,略大于一个磁钢的高度,磁浮子由零位置到运动到***大高度时,磁力线所覆盖的区域内,磁感应强度的大小和方向发生了改变。
(2)高度转换及磁感应强度的测量对浮子位移(高度)的测量,不管是直位移还是角位移,归根到底都可视为对磁力线(磁感应强度)的测量。对单对磁极而言,不管是条形磁钢,还是圆形磁钢,磁性***强的部分集中在两极,磁力线从N极出发,从S级回归,因此在测量过程中,磁钢可视为条形磁铁。
磁感应强度可用霍尔器件测出,经过多方面定位、测试数据及图形分析,***终确立两个霍尔器件串联,且垂直放置。设计线路板时霍尔器件需定位。将霍尔器件焊接在线路板上,安装时固定在浮子行程起始位置处,当磁浮子上下移动时,经过霍尔器件的磁感应强度B的大小和方向都会发生变化,浮子全行程B的方向大约改变90![]()
![]() ,霍尔器件的法向量也会发生变化,从而使霍尔器件的输出电压发生变化,通过采集霍尔器件的输出电压,送经微处理器,再加上一些运算规则,就可将浮子直位移(高度)转换成对应的角度ɑ,这里要注意B方向改变的角度与转换角度ɑ的区别,转换角度ɑ是为了方便计算而引入的一个中间变量。霍尔器件放置的示意图如图2所示。
,霍尔器件的法向量也会发生变化,从而使霍尔器件的输出电压发生变化,通过采集霍尔器件的输出电压,送经微处理器,再加上一些运算规则,就可将浮子直位移(高度)转换成对应的角度ɑ,这里要注意B方向改变的角度与转换角度ɑ的区别,转换角度ɑ是为了方便计算而引入的一个中间变量。霍尔器件放置的示意图如图2所示。
本测量采用了两个霍尔器件,微处理器采集两个霍尔器件的输出电压,在运算时,采用磁钢的磁感应强度之比,从而消除了磁感应强度波动而带来的影响量;采用霍尔器件灵敏度系数之比,从而也就消除了霍尔器件灵敏度系数波动而带来的影响量。提高了整体测量的稳定性。
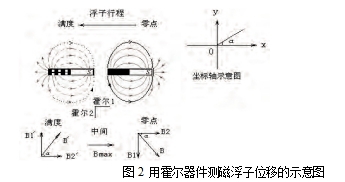
图2 用霍尔器件测磁浮子位移的示意图
图2中,B为磁力线在零点的磁感应强度,在零点时霍尔器件1的法向量磁感应强度为B1,霍尔器件2的法向量磁感应强度为B2;在中点时,霍尔器件1的法向量磁感应强度为0,霍尔器件2的法向量磁感应强度为Bmax;B'为磁力线在满度时的磁感应强度,在满度时霍尔器件1的法向量磁感应强度为B1' ,霍尔器件2的法向量磁感应强度为B2' 。
2、设计框图:
2.1、硬件设计框图:

图3 直位移磁浮子流量计硬件设计框图
图3中采集模块为一个厚膜集成电路,它包含了A/D、CPU、D/A、E2PROM、HART通讯、恒压激励、恒流激励等。
2.2、软件设计框图:
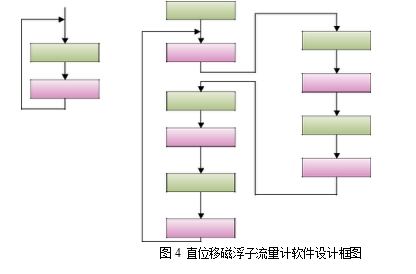
图4 直位移磁浮子流量计软件设计框图
3 采集信号的处理、运算法则及实验数据
3.1 采集信号的处理与运算法则
霍尔器件的输出电压为U=SIB [2],S= ned1[2],当半导体的材料和尺寸选定之后,S为常数,这样,U ∝ IB 。在零点时,若规定
![]()
![]()
B与B2的夹角为α,则
B1=B•sinα B 2=B•cosα
坐标轴如图5所示,那么霍尔1输出的电压值为:
U1=SIB1 = SIB•sinα
霍尔器件2输出的电压值为:
U2=SIB2 = SIB•cosα
式中,I为霍尔器件流过的电流,B为霍尔器件所在处的磁感应强度。霍尔器件输出的电压,经集成微处理器的两路AD采集后,参与运算。
运算法则为:
| U1 | SIB1 | B1 | B sinα sinα | |||||
| U2 | = | = B2 | = | B cosα= cosα=tanα | (3) | |||
| SIB2 | ||||||||
| -1 | 180 | (4) | ||||||
| α=tan | α× | π | ||||||
行程中,其它任意一点的运算法则也是如此。
因为正切函数的周期是π,为了观察方便,使显示的测量角度不含负角,不过0°,所以测量角度都向正角迁移180°。经调整后的角度值为:180![]()
![]() +tan-1α×180π
+tan-1α×180π![]()
![]()
按图2磁力线及坐标轴所示,随着磁浮子的整个行程移动,磁力线方向改变的示意过程及各个霍尔器件的法向量的磁感应强度、转换的运算过程见表1。
| 表1 | 磁浮子位移过程中变量分析表 | |||||||
| 过程变量 | 零点 | 中间值 | 满度值 | |||||
| b | ↘ | → | ↗ | |||||
| b1 | <0 | 0 | >0 | |||||
| b2 | >0 | max | >0 | |||||
| <0 | 0 | >0 | ||||||
| tan23 | 180 | (-90°,0°] | 0° | [0°,90°) | ||||
| 7 | ||||||||
| 1806 + tan89 : 5 | 180 | (90°,180°] | 180° | [180°,270°) | ||||
| ; | ||||||||
为方便直观,运算法则对应的函数图如图5所示。
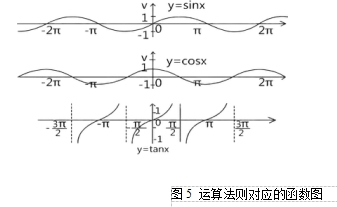
图5 运算法则对应的函数图
经上面推导可见,浮子的直位移变成了磁感应强度的变化,通过对磁感应强度变化的测量,就建立了磁浮子高度与转换角度的对应关系;用户做传感器校准时,输入流量与转换角度的对应关系,这样就建立了浮子位移与流量的一一对应关系。
3.2、实验数据:
测试时,将霍尔器件置于磁铁行程的起端,测试过程为一个完整的浮子位移,此位移略大于磁钢的长度。测量方法:将刻度尺绑在可移动的浮子上,每次用手推动相同的位移,利用HART[3]通讯的上位软件监测霍尔元件的电压值、及转换后的角度值并记录。
(1)重复性测量
| 表2 | 25mm测量管测试数据(平行2次) | |||||||||
| 浮子 | U1(mv) | U2(mv) | U1/U2(tan) | α(°) | △α(°) | |||||
| 位移 | ||||||||||
| 1 | 2 | 1 | 2 | 1 | 2 | 1 | 2 | 1 | 2 | |
| 0 | -2.315 | -1.851 | -1.532 | -1.218 | 1.511 | 1.519 | 236.5 | 236.7 | ||
| 1 | -2.096 | -1.729 | -2.343 | -1.758 | 0.894 | 0.983 | 221.9 | 224.4 | -14.6 | -12.3 |
| 2 | -1.684 | -1.382 | -2.940 | -2.320 | 0.573 | 0.595 | 209.8 | 210.8 | -12.1 | -13.6 |
| 3 | -0.994 | -0.891 | -3.469 | -2.727 | 0.286 | 0.327 | 196.0 | 198.1 | -13.8 | -12.7 |
| 4 | -0.277 | -0.293 | -3.756 | -2.988 | 0.074 | 0.098 | 184.2 | 185.6 | -11.8 | -12.5 |
| 5 | 0.536 | 0.344 | -3.890 | -3.116 | -0.138 | -0.110 | 172.2 | 173.7 | -12.0 | -11.9 |
| 6 | 1.409 | 0.991 | -3.869 | -3.114 | -0.364 | -0.318 | 159.9 | 162.3 | -12.3 | -11.4 |
| 7 | 2.166 | 1.697 | -3.683 | -2.969 | -0.588 | -0.571 | 149.5 | 150.2 | -10.4 | -12.2 |
| 8 | 2.950 | 2.296 | -3.260 | -2.675 | -0.905 | -0.858 | 137.7 | 139.3 | -11.8 | -10.8 |
| 9 | 3.531 | 2.802 | -2.676 | -2.192 | -1.319 | -1.278 | 127.2 | 128.1 | -10.5 | -11.2 |
| 10 | 3.858 | 3.095 | -2.004 | -1.620 | -1.925 | -1.910 | 117.4 | 117.6 | -9.8 | -10.5 |
由表2的实验记录可以看出,随浮子位移的增大,转换角度α呈递减趋势;浮子移动相同的位移时,转换角度的变化量△α基本相等,数据的重复性较好,个别点数据差距较大,可能是因为用手推动浮子时位置定位不准造成。
(2)激励电流反向测量
| 表3 | 25mm测量管测试数据(激励电流反向) | ||||
| 浮子位移 | U1(mv) | U2(mv) | U1/ | α(°) | △α(°) |
| U2(tanα) | |||||
| 0 | 1.937 | -1.305 | -1.484 | 123.9 | |
| 1 | 1.687 | -2.058 | -0.820 | 140.6 | 16.7 |
| 2 | 1.304 | -2.540 | -0.513 | 152.8 | 12.2 |
| 3 | 0.716 | -2.943 | -0.243 | 166.3 | 13.5 |
| 4 | 0.187 | -3.145 | -0.059 | 176.6 | 10.3 |
| 5 | -0.484 | -3.253 | 0.149 | 188.6 | 12.0 |
| 6 | -1.174 | -3.234 | 0.363 | 199.9 | 11.3 |
| 7 | -1.892 | -3.041 | 0.622 | 211.8 | 11.9 |
| 8 | -2.488 | -2.694 | 0.923 | 222.6 | 10.8 |
| 9 | -3.000 | -2.100 | 1.428 | 235.0 | 12.4 |
| 10 | -3.252 | -1.421 | 2.288 | 246.3 | 11.3 |
表3中,U1、U2列对应的图形如图6所示。
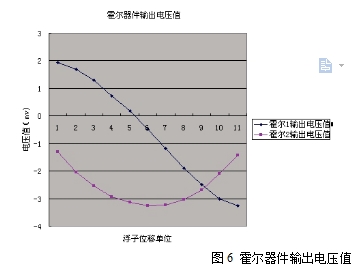
图6 霍尔器件输出电压值
U1U2 (tanα)列对应的图形如图7所示。
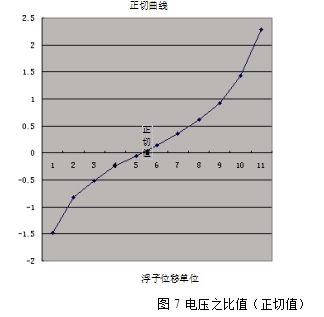
浮子位移单位
图7 电压之比值(正切值)
α列对应的图形如图8所示。
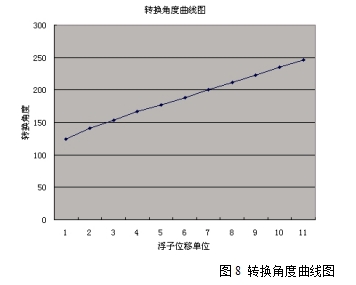
图8 转换角度曲线图
由表3的记录数据及生成的图形可以看出,调整电流方向可以调整转换角度α的走向,使之随浮子位移的增大而递增;并且实验结果与运算法则相匹配;测试数据的线性度较好。直位移测量方式的样机测量的稳定性大约在0.3%,-20℃~70℃范围内,整机测量精度可达1%。
(3)稳定性测试
| 表4 稳定性测试的数据 | |
| 时间 | 传感器值 |
| 17:07:21 | 238.5830 |
| 08:29:18 | 237.7839 |
| 08:34:22 | 237.8006 |
| 08:39:26 | 237.7168 |
| 08:44:30 | 237.8722 |
| 08:49:34 | 237.7824 |
| 08:54:38 | 237.8861 |
表4是用双霍尔器件测试直浮子位移,经过9.5小时的漂移数据。从以上记录数据可以看出,9.5个小时的漂移为0.7度,以满量程为100度计算,相对值为0.7%,小于1%,漂移稳定。
4、结论:
由于用非接触式的霍尔器件测量磁浮子高度,不需要任何可动的机械零件,消除了机械零件之间摩擦力和传动误差,省去了旋转磁钢及测量磁钢,这样简化了表壳的整体结构,节约了成本;在直径小于等于25mm的测量管中,它的测量精度优于1%,目前该种测量方式用于细管的流量测量中,和角位移测量方式比较,直位移的磁钢距霍尔器件较远,磁感应强度较弱,因此它测量的稳定性比角位移差。在精度及稳定性允许的范围内,不失为一种简便而可行的方式。本文中测量浮子位移的分析方法具有共性,单对磁极浮子的位移都可用此方法进行分析,这样使抽象的、复杂的测量机构,变得简单、直观,易于处理。
